

4.7.2.2. Гиперболоидные зубчатые передачи
Геометрическое место положений мгновенных осей вращения называют аксоидом. В зубчатой передаче со скрещивающимися осями колес при постоянном передаточном отношенииаксоидами относительного движения являются однополюсные гиперболоидывращения. Поэтому зубчатые передачи со скрещивающимися осями колес называют гиперболоидными.
Винтовая передача
Эта передача состоит из двух эвольвентных цилиндрических косозубых колес (рис. 4.12), оси которых скрещиваются в общем случае под произвольным углом . Межосевой угол
= W1 W2
где – углы наклона линий
зубьев (винтовых линий) по начальным
цилиндрам; знак “+” соответствует
одноименному направлению винтовых
линий, “–” – разноименному.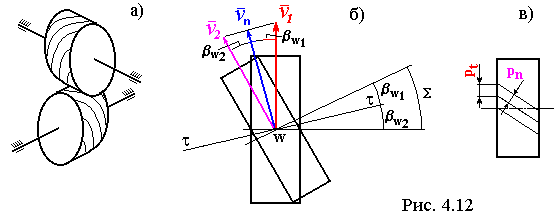
В частном случае ортогональной передачи =W1 W2 = 90O.
Как для любых косозубых колес в данном случае различают торцевой ptи нормальныйpnшаг зацепления
pn = pt/cosW
На рис. 4.12бпостроен план скоростей для контактной точки, совпадающей с полюсом зацепления “w”.
Из pvnv1: vn = v1 cos W1
из pvnv2: vn = v2 cos W2
Следовательно: v1cosW1 =v2cosW2
или 1R1 cos W1 = 2 R2 cos W2
Тогда передаточное отношение:

( 4.18 )
Отметим, что для данного механизма передаточное отношение зависит не от 2-х, а от 4-х параметров.
Червячная передача
Эта передача
применяется для передачи вращения между
валами с перекрещивающимися валами,
когда угол скрещивания = 90O(рис. 4.13). Червячная
передача – это частный случай винтовой.
Здесь угол наклона зубьев 1-го колеса
весьма велик:W1
= 80O… 88O.
При этом винтовая линия зуба 1-го колеса
несколько раз опоясывает делительный
цилиндр. Такое колесо называютчервяком,
а такие зубья называют витками или
нитками. Каждый виток имеет начало на
торце колеса, и его называютзаходом(a1). Количество
заходов червяка является аналогом
количества зубьев на колесе.
Сопряженное с червяком колесо называется червячным колесом. Т.к. =W1 +W2 = 90O, то уголW2 мал и червячное колесо приближается к цилиндрическому. Для червяка угол подъема винтовой линии=W2.
Геометрические соотношения в червяке
Количество заходов: a1 = 1 … 4;
d1 –диаметр начального цилиндра;
pa – осевой шаг червяка: расстояние двумя одноименными точками двухсоседнихпрофилей, измеренное вдоль оси червяка;
h1=a1pa– ход червяка: расстояние двумя одноименными точками соседнихпрофилей витка.
Развернем виток червяка на плоскость в пределах одного поворота (рис. 4.13в).
где q–
коэффициент диаметра червяка.
Передаточное отношение:

На рис. 4.13г представлен план скоростей, соответствующий этому векторному уравнению.
Тогда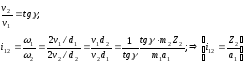
Диапазон передаточных отношений червячной передачи весьма широк i12= 20 …200, но КПД, вследствие большого скольжения, довольно низок.
4.8. Кинематический анализ зубчатых механизмов
Применительно к зубчатым механизмам кинематический анализ сводится к определению их передаточных отношений.
4.8.1. Рядные механизмы
Пример механизма типа простой зубчатый ряд представлен на рис 4.14а. Определим его передаточное отношение, применив искусственное преобразование.

( 4.19 )
где k – количество внешних зацеплений.

Обобщая формулу (4.19) на произвольное число ступеней “n”, получим:

( 4.20 )
Таким образом, передаточное отношение механизма типа простой зубчатый ряд равно произведению передаточных отношений ступеней.
Этот вывод можно еще более обобщить: при последовательном соединении механизмов общее передаточное отношение равно произведению передаточных отношений соединяемых механизмов.