

4.5.2. Метод обкатки
Этим
методом можно изготовить только
колеса с эвольвентным профилем зубьев.
Инструментом в данном случае может
являться: режущая рейка, червячная фреза
или долбяк. На рис. 4.6 показана схема
изготовления колеса методом обкатки
режущей рейкой. Движение резанья
происходит перпендикулярно плоскости
рисунка.
Если инструмент и заготовка расположены друг относительно друга так, что делительная прямая режущей рейки касается делительной окружности колеса, то говорят, что колесо изготавливается без смещения инструмента (коэффициент смещения x = 0). Смещение инструмента от центра заготовки называется положительным, к центру – отрицательным. Величина смещения равна xm.
К недостаткам метода можно отнести то, изготовить можно только колеса с эвольвентным профилем зубьев.
К преимуществам этого метода относится его относительная дешевизна. Т.к. во-первых, режущие кромки, например, режущей рейки прямолинейны и их обработка гораздо дешевле, чем для инструмента в методе копирования. А во-вторых, инструмент более универсален: одной и той же рейкой можно изготавливать различные колеса с одним модулем.
4.6. Явления подреза и заострения зуба.
Минимальное число зубьев на колесе
При проектировании зубчатых механизмов часто возникает задача уменьшения диаметров колес, так как при этом уменьшается металлоемкость конструкции и, следовательно, ее стоимость. Поскольку диаметр делительной окружности колеса равен d = m Z, то уменьшитьdможно либо уменьшением модуля, либо уменьшением числа зубьев.
Модуль колес
определяется по условиям прочности и
не может быть меньше, чем требуется для
обеспечения контактной и изгибной
прочности зубьев. 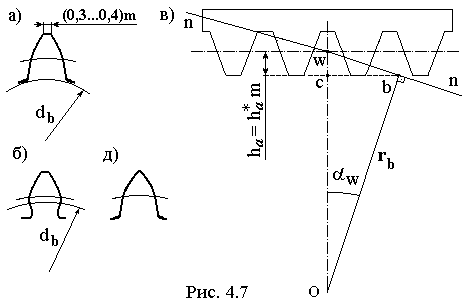
Следовательно, дальнейшее уменьшение диаметра колеса возможно только за счет уменьшения числа зубьев. Однако, как показала практика, при малом числе зубьев на колесе изготовление его методом обкатки приводит к образованию подрезанного зуба (рис. 4.7б). Это связано с тем, что эвольвента существует только снаружи от основной окружности db, а при малом числе зубьев эта окружность проходит по телу зуба, и та его часть, которая находится внутриdbэвольвентой не является, а, следовательно, и не отвечает условиям основной теоремы зацепления. При достаточно большом числе зубьев основная окружность проходит ниже окружности впадин, как это показано на рис. 4.7а, или в пределах радиального зазора зацепления и тогда весь зуб или его рабочая часть имеет форму эвольвенты.
Таким образом, во избежание явления подреза зуба надо найти такое количество зубьев Zmin, начиная с которого возникает описанная выше ситуация. Рассмотрим сначала случай изготовления колеса без смещения инструмента.
На рис. 4.7в представлена расчетная схема, где режущая рейка находится в предельно допустимом положении, когда вершины ее зубьев находятся на линии bc, т.е. когда вершины зубьев рейки касаются основной окружности (см. также рис. 4.6).
По построению имеем:
ha = OW – OC = rmin – rb cos W = rmin – rmin cos2 W =
= rmin (1– cos2 W) = rmin sin2 W
Откуда
ha* m = (dmin/2) sin2 W
ha* m = (m zmin/2) sin2 W