

4.8.5. Определение передаточных отношений сложных зубчатых механизмов
Под
“сложными” здесь будем понимать
зубчатые механизмы, представляющие
собой последовательное соединение
механизмов, рассмотренных выше типов
(рядные, с промежуточными колесами,
планетарные, волновые).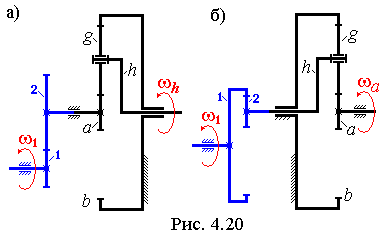
На рис. 4.20 представлены примеры механизма, первая ступень которого (колеса 1, 2) представляет собой рядный механизм, а вторая ступень – планетарный механизм схемы “A”. Как было показано выше в п. 4.8.1 при последовательном соединении механизмов общее передаточное отношение равно произведению передаточных отношений соединяемых механизмов. Поэтому общее передаточное отношение механизма на рис. 4.20а:
При
определении передаточных отношений
сложных (или как их часто называют
многоступенчатых) механизмов необходимо
обращать внимание на направление
включения ступеней. В частности, на рис.
4.20б
вторая (планетарная) ступень включена
в обратном направлении, чем на рис.
4.20а, кроме того, первая ступень имеет
внутреннее зацепление. Передаточное
отношение такого механизма:
4.9. Силовой расчет зубчатых механизмов
Постановка задачи силового расчета в самом общем виде будет дана позже при рассмотрении силового расчета рычажных механизмов. При силовом расчете зубчатых механизмов решают три основные задачи:
Расчет крутящих моментов на валах.
Определение усилий в зацеплениях.
Определение реакций в опорах валов.
4.9.1. Расчет крутящих моментов на валах
Рассмотрим
сначала машинный агрегат, в который
входит двигатель (Д), рядный зубчатый
механизм и некоторый исполнительный
механизм (ИМ), рис. 4.21. И решим две
конкретные часто встречающиеся задачи.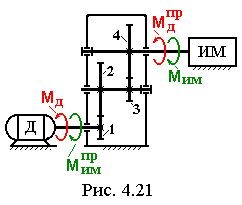
1. Пусть известен момент, развиваемый двигателем MД, а нас интересует – какой момент при этом поступит на исполнительный механизмMДПР. Такое приведение момента с одного вала на другой производится по формуле:
MДПР =MД i1414 ( 4.33 )
где i14– передаточное отношение между колесами 1,4,14 – КПД передачи.
2. Пусть известен момент, сопротивления исполнительного механизма MИМ, а нас интересует – какой момент должен при этом развивать двигательMИМПР.
MИМПР =MИМ /i1414( 4.34 )
Теоретическое обоснование формул (4.33), (4.34) будет дано позже при рассмотрении метода приведения в главе, посвященной динамике машин с абсолютно жесткими звеньями.
В планетарных механизмах схем В и С (см. рис. 4.16, 4.17) на валах сателлитов тоже действуют крутящие моменты. При их определении следует иметь ввиду, что в этих механизмах нагрузка распределяется на все сателлиты, поэтому момент на их валах:
Mg = Ma iag ag / nw ( 4.34 )
где nW– количество сателлитов.
4.9.2. Усилия в зацеплениях
Вообще
говоря, в зацеплении действует одно
усилие – это реакция Rв точке
контакта со стороны одного зуба на
другой (рис. 4.22). Однако для расчетов
удобнее использовать ее проекции.Окружное усилие: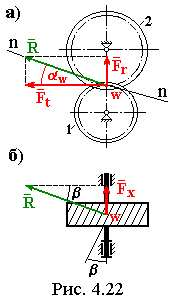

( 4.35 )
где Mj – крутящий момент, действующий на данном колесе, dWj– диаметр начальной окружности колеса.
Радиальное усилие:
Fr = Ft tg W( 4.36 )
В косозубых и винтовых передачах возникает еще одно усилие – осевое(рис. 5.22б):
Fx = R sin ( 4.37 )
где – угол наклона зубьев.
Возникновение осевого усилия можно считать недостатком косозубых колес, т.к. оно воспринимается подшипниками вала и в этом случае необходимо хотя бы один подшипник делать радиально-упорным. Для преодоления этого недостатка применяют колеса с шевронными зубьями.