

2.7. Графо-аналитический метод планов2
Этот
метод кинематического анализа более
нагляден, чем метод векторных контуров
и преобразования координат и особенно
полезен для изучения механики механизмов
и удобен для проверочных расчётов. Уже
из его названия следует, что это
комбированный метод. Его
суть состоит
в том, что аналитически формируются
кинематические уравнения, которые
решаются с применением графических
построений, называемых планами скоростей
и ускорений.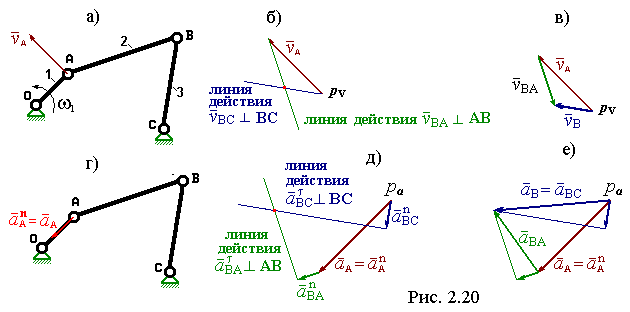
Схема для расчёта этим методом кинематики четырёхшарнирного механизма представлена на рис. 2.20.
Построение плана скоростей четырёхшарнирного механизма
1. Выбранном масштабе вычерчиваем план механизма в расчётном положении (см. рис. 2.20а).
2. Параметры движения входного кривошипа OA известны по постановке задачи, вычисляем величину скорости конца кривошипа
vA=1l1
3.
Полагая, что кривошип является абсолютно
твёрдым телом, направляем вектор перпендикулярно оси кривошипа (см. рис.2.20а).
перпендикулярно оси кривошипа (см. рис.2.20а).
Определим скорость шарнира B
Он принадлежит одновременно шатуну AB и коромыслу BC. (.)B AB, поэтому, если принять (.)A за полюс, то скорость (.)B представима как

где
 –
скорость (.)B
относительно (.)A.
–
скорость (.)B
относительно (.)A.
С другой стороны, (.)B BC. Тогда скорость точки B представима как

где – скорость (.)B
относительно (.)C.
– скорость (.)B
относительно (.)C.
В
данном случае vC
= 0, поэтому .
.
Таким
образом, для определения
 мы
получили систему векторных уравнений:
мы
получили систему векторных уравнений:
( 2.38 )
Решим её графически путём построения плана скоростей, который представляет собой графическое представление системы (2.38).
1.
Выбираем масштабный коэффициент для
плана скоростей kV,
имеющий размерность ,и из полюса плана
pV
в этом масштабе откладываем вектор
,и из полюса плана
pV
в этом масштабе откладываем вектор (см. рис. 2.20б).
(см. рис. 2.20б).
2.
Величина вектора нам пока не известна, но известно, что
его линия действия перпендикулярна оси
шатунаAB.
В соответствии с первым уравнением
системы (2.38) проводим её на плане скоростей
из конца вектора
нам пока не известна, но известно, что
его линия действия перпендикулярна оси
шатунаAB.
В соответствии с первым уравнением
системы (2.38) проводим её на плане скоростей
из конца вектора
 перпендикулярно
шатунуAB
– зелёная линия на рис. 2.20б.
перпендикулярно
шатунуAB
– зелёная линия на рис. 2.20б.
3.
Величина вектора пока тоже не известна, но известно, что
её линия действия перпендикулярна оси
коромыслаBC.
Проводим её на плане скоростей из его
полюса, т.к. первое слагаемое в правой
части второго уравнения системы (2.38)
равно нулю (синяя линия перпендикулярно
BC)
– рис. 2.20б.
пока тоже не известна, но известно, что
её линия действия перпендикулярна оси
коромыслаBC.
Проводим её на плане скоростей из его
полюса, т.к. первое слагаемое в правой
части второго уравнения системы (2.38)
равно нулю (синяя линия перпендикулярно
BC)
– рис. 2.20б.
4. Точка пересечения этих линий удовлетворяет обоим уравнениям системы (2.38). Следовательно, она и является её решением. Обозначаем найденные векторы – рис. 2.20в.
Величины найденных векторов определим, измеряя их на плане и умножая на масштабный коэффициент.
Величины угловых скоростей: 2 = vBA/lAB, 3 = vB/lBC.
Построение плана ускорений четырёхшарнирного механизма
при постоянной угловой скорости кривошипа
1. Выбранном масштабе вычерчиваем план механизма в расчётном положении (см. рис. 2.20а,г).
2. Параметры движения входного кривошипа OA известны по постановке задачи, вычисляем величину ускорения конца кривошипа, которая при 1 = Const имеет только нормальную составляющую
aA=aAn=12l1
3.
Полагая, что кривошип является абсолютно
твёрдым телом, направляем вектор
 вдоль оси кривошипа от (.)A
к (.)O
(см. рис. 2.20г).
вдоль оси кривошипа от (.)A
к (.)O
(см. рис. 2.20г).
Определим ускорение шарнира B
Он принадлежит одновременно шатуну AB и коромыслу BC.
(.)B
AB,
поэтому, если принять (.)A
за полюс, то ускорение (.)B
представимо как
где
 –
ускорение (.)B
относительно (.)A,
–
ускорение (.)B
относительно (.)A,
 – его нормальная и касательная
составляющие.
– его нормальная и касательная
составляющие.
С другой стороны, (.)B BC. Тогда ускорение точки B представима как

где
 –
ускорение (.)B
относительно (.)С,
–
ускорение (.)B
относительно (.)С,
 – его нормальная и касательная
составляющие.
– его нормальная и касательная
составляющие.
В
данном случае aC
= 0, поэтому
 .
.
Таким
образом, для определения
 мы получили систему векторных уравнений:
мы получили систему векторных уравнений:
(2.39)
Решим её графически путём построения плана ускорений. План ускорений представляет собой графическое представление системы (2.39).
1.
Выбираем масштабный коэффициент для
плана ускорений ka,
имеющий размерность
 ,
и из полюса планаpa
в этом
масштабе откладываем вектор
,
и из полюса планаpa
в этом
масштабе откладываем вектор
 (см.
рис.2.20д).
(см.
рис.2.20д).
2. Величину нормальной составляющей aBAn можно вычислить:
aBAn = vBA2/ l2 = 22 l2.
Направлено она вдоль оси шатуна 2 от (.)B к (.)A. Откладываем её на плане (см. рис. 2.20д).
3. Касательная составляющая aBA нам пока не известна, но известно, что её линия действия перпендикулярна оси шатуна AB. В соответствии с первым уравнением системы (2.39) проводим её на плане скоростей из конца вектора aBAn перпендикулярно шатуну AB – тонкая зелёная линия на рис. 2.20д.
4. Величину нормальной составляющей aBCn можно вычислить:
aBCn = vB2/ l3 = 32 l3.
Направлена она вдоль оси коромысла 3 от (.)B к (.)C. Откладываем её на плане ускорений из его полюса, т.к. первое слагаемое в правой части второго уравнения системы (2.39) равно нулю (см. рис. 2.20д).
5. Касательная составляющая aBC пока тоже не известна, но известно, что её линия действия перпендикулярна оси коромысла BC. Проводим её на плане ускорений из конца вектора aBCn – тонкая синяя линия на рис. 2.20д.
6. Точка пересечения линий удовлетворяет обоим уравнениям системы (5.13). Следовательно, она и является её решением. Обозначаем найденные векторы – рис. 2.20е.
Векторные суммы нормальных и касательных составляющих являются полными ускорениями точек

Величины найденных векторов определим, измеряя их на плане и умножая на масштабный коэффициент.
Величины угловых ускорений: 2 = aBA/lAB, 3 = aBC/lBC.