

3.8.4. Определение радиуса ролика
При проектировании кулачкового механизма с роликом значение RP радиуса ролика может быть задано конструктором. В этом случае необходима проверка правильности выбранной величины. Если RP не задано, то эта величина рассчитывается на основе анализа кривизны профиля кулачка. Для неё должны удовлетворяться следующие неравенства [1, 9, 14]:
RP 0,7 min; RP 0,4 R O; (3.40)
где
min
– минимальный радиус кривизны центрового
профиля кулачка;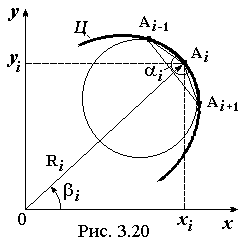
RO – радиус базовой окружности кулачка.
В п. 3.8.1, 3.8.3 рассмотрен расчет координат профиля кулачка (Ri, i), i = 1,2 … n. По этим величинам для каждых трех точек на центровом профиле кулачка Ai-1, Ai, Ai+1 (рис. 3.20) можно определить радиус описанной окружности i, который и будет приближенным значением радиуса кривизны центрового профиля в i-й точке.
xi = Ri cos i; yi = Ri sin i. ( 3.41 )
Длины сторон треугольника Ai-1AiAi+1:

( 3.42 )
где k, j = i–1, i, i+1.
Решая треугольник Ai-1AiAi+1, получаем:
( 3.43 )
где p – полупериметр треугольника Ai-1AiAi+1.
Произведя вычисления по формулам (3.41) … (3.43) для i = 2, 3 … n-1, находим значение
min = min i.
Если RP задан конструктором, то проверяются условия (3.40). Если он не задан или эти условия не выполняются, то конструктор, по известному теперь min из конструктивных соображений может принять любое значение RP в соответствии с условиями (3.40).
4. Зубчатые механизмы
4.1. Классификация Зубчатые – это, наверное, самый широко распространенный класс механизмов. Большое разнообразие этих механизмов можно классифицировать следующим образом.
1. По структуре и кинематике:
а) механизмы с неподвижными осями колес (рис. 4.1а,в,г,д,е,ж);
б) механизмы, в составе которых есть колеса с подвижными осями: планетарные (рис. 4.1б) и дифференциальные;
в) механизмы, в составе которых есть упруго деформируемые колеса (волновые).
2. По расположению осей колес:
а) механизмы с параллельными осями колес (цилиндрические рис. 4.1а,д,е,ж);
б) оси колес пересекаются (конические – рис. 4.1в);
в) оси колес скрещиваются (винтовые – рис. 4.1г, червячные, гипоидные).
3. По форме рабочей поверхности зуба:
а) эвольвентные;
б) циклоидальные;
в) часовое зацепление (приближенное на основе циклоидального);
г) зацепление Новикова;
д) цевочное зацепление.
4. По форме оси зуба: а) прямозубые (рис. 4.1д);
б) косозубые (рис. 4.1е);
в) шевронные (рис. 4.1ж);
г) винтовые (рис. 4.1г).
4.2. Основная теорема зацепления
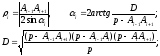
Основная теорема зацепления или теорема Виллиса формулируется следующим образом (рис. 4.2а). Общая нормаль к поверхностям двух вращающихся тел, проведенная в точке контакта отсекает от межцентрового расстояния отрезки, обратно пропорциональные угловым скоростям звеньев. То есть:
Доказательство.
Пусть k
– точка контакта, w
– точка пересечения общей нормали n-n
с линией межцентрового расстояния O1O2.
Построим план скоростей vК1
– скорость точки k,
если считать её принадлежащей звену 1,
vК2
– скорость точки k,
если считать её принадлежащей звену 2
(см. рис. 4.2а). Условием непрерывности
контакта является равенство проекций
этих скоростей на общую нормаль n-n:
vК1n
= vК2n.

Угловые скорости звеньев:
Из
подобия треугольников: O1b1k
ka1С
и O2b2k
ka2С:

Тогда отношение угловых скоростей:
( 5.1 )

Последнее равенство в соотношениях (4.1) следует из подобия треугольников: O1b1W O2b2W (см. рис. 4.2а). Теорема доказана.
Когда
в процессе движения точка k
проходит положение w,
то в этот момент равны, не только
нормальные, но и касательные составляющие
скорости vК1
= vК2,
т.е. скорости полностью равны ,
поэтому точкаw
названа полюсом
зацепления.
,
поэтому точкаw
названа полюсом
зацепления.
По
определению, отношение угловых скоростей
называется передаточным отношением:
Как правило, при проектировании зубчатых механизмов требуется постоянное передаточное отношение.
Следствия из основной теоремы зацепления. Для того чтобы передаточное отношение было постоянным необходимо, чтобы в процессе зацепления полюс зацепления не менял своего положения.
В свою очередь для того, чтобы полюс зацепления не менял своего положения необходимо, чтобы профили контактирующих поверхностей представляли собой взаимоогибаемые кривые.
В полной мере этому требованию удовлетворяют циклоиды (см. рис. 4.2б), которые образуются при перекатывании без скольжения одной окружности по другой. И исторически первым правильным зацеплением было именно циклоидальное, т.е. такое, когда боковые поверхности зубьев представляют собой отрезки циклоид.
Однако у циклоидального зацепления есть недостаток – его сравнительно высокая стоимость. Причины этого рассматриваются позже в подразделе “Методы изготовления зубчатых колес”.
Требованию основной теоремы зацепления удовлетворяет и эвольвента окружности – кривая, образующаяся при перекатывании без скольжения прямой по окружности (см. рис. 4.2в). Изготовление колес с эвольвентным профилем зубьев оказалось гораздо более дешевым, и, несмотря на то, что такие колеса имеют несколько большие размеры, – эвольвентное зацепление в машиностроении получило самое широкое применение. В дальнейшем рассматривается именно этот вид зацепления.