

5.3. Внешние силы
Расчет внешних сил во многих случаях является отдельной задачей, относящейся к специальным наукам. Например, на рис. 5.1а изображён механизм пресса. Технологическая сила, приложенная к пуансону во время выполнения операции штамповки, вытяжки и т.п. зависит от многих факторов: материала заготовки, скорости процесса, площади обработки и т.д. Расчет такого рода сил изучается в механике сплошной среды. Для всех машин технологические нагрузки вычисляются с помощью соответствующих математических моделей тех процессов, для выполнения которых машина предназначена, поэтому здесь мы будем полагать технологические силы заданными.
Силы тяжести вычисляются по известной формуле
Gi = mi g ,
где: mi – масса i-го звена, g – ускорение свободного падения.
Однако они учитываются только если механизм расположен в вертикальной плоскости.
Инерционная
нагрузка
для звеньев механизмов в общем случае
состоит из двух компонент. Сил
инерции:
где aSi – ускорение центра масс i-го звена,
и
инерционных моментов; для плоских
механизмов:
где JSi – момент инерции i-го звена, i – его угловое ускорение.
Знак минус указывает на то, что инерционная нагрузка направлена противоположно ускорению.
Особый
класс составляют силы
трения.
Они зависят от типа трения –качение
или скольжение, вида контакта, состояния
поверхностей, вида смазки, температурного
режима и т.п. Эти вопросы рассматриваются
в триботехнике [19]. Однако необходимость
в тонких расчетах сил трения возникает
только в тех случаях, когда их доля в
общей силовой картине достаточно велика,
это характерно, например, для точного
приборостроения. Данное учебное пособие
ориентируется в большей степени на
машиностроение, а здесь, как правило,
доминируют технологические нагрузки
и силы трения можно учитывать по более
грубым методикам. В таких случаях
наиболее широко благодаря своей простоте
применяется гипотеза сухого трения, в
соответствии с которой сила трения: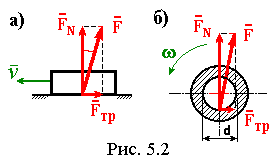
FТР = fтр FN, ( 5.1 )
где: fтр – коэффициент трения;
FN – нормальная реакция в кинематической паре без учета трения (рис. 5.2).
Для вращательных кинематических пар (рис. 5.2б) удобней пользоваться моментом силы трения:
МТР = FТР d/2, ( 5.2 )
где: d – диаметр поверхности, по которой происходит скольжение.
Если во вращательной кинематической паре устанавливается подшипник качения, то момент трения в первом приближении можно вычислить по формуле [2, 13]:
МТР = FN d/2, ( 5.3 )
где: – приведенный коэффициент трения (табл. 5.1),
d – диаметр отверстия подшипника, мм.
Таблица 5.1
|
Тип подшипника |
|
|
Шариковый радиальный: однорядный . . . . . . . . . . . . . . . . . . . . . двухрядный сферический . . . . . . . . . . . . . Шариковый радиально-упорный однорядный . . . . . Роликовый радиальный: однорядный с цилиндрическими роликами . . . . игольчатый безсепараторный . . . . . . . . . . . . двухрядный сферический . . . . . . . . . . . . . Роликовый радиально-упорный конический . . . . . . . Шариковый упорный . . . . . . . . . . . . . . . . . . . Роликовый упорный с цилиндрическими роликами . . . . . . . . . . . сферический . . . . . . . . . . . . . . . . . . . . . |
0,0015 0,001 0,002
0,0011 0,0025 0,0018 0,0018 0,0013
0,004 0,0018 |
Как следует из формул (5.1) . . . (5.3) для вычисления сил трения необходимо знать величины реакций, но их значения будут определены только в конце силового расчета. Этот “заколдованный круг” преодолевается с помощью итеративного процесса, алгоритм которого представлен на рис. 5.3.
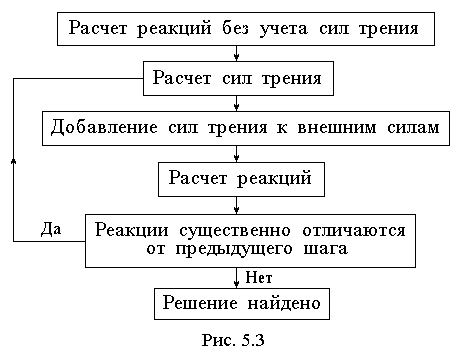
Критерий существенности отличия значений реакций на двух последующих итерациях зависит от требований к точности расчета и определяется проектировщиком. Обычно достаточно 1 ... 2 %.