

5.5.2.2. Крутящий момент на кривошип передается через планетарный или волновой механизм
Схема в аксонометрии показана на рис. 5.16. Соответствующая плоская расчетная схема представлена на рис. 5.18а.
В
этом случае крутящий момент, действующий
на кривошип создается несколькими
усилиями тоже называемыми уравновешивающими
силами, но
возникающими в осях сателлитов Fуi
(i
= 1,
2, ... nw);
где: nw –
количество сателлитов. Обычно в силовых
механизмах nw
= 3 … 5.
Однако, для силового расчета это не
имеет значения, поскольку, как следует
из плана сил на рис. 5.18б, усилия Fуj
образуют замкнутый контур и в сумме не
создают дополнительной реакции в опоре
кривошипа т.к.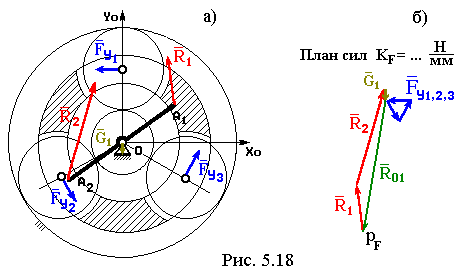
Поэтому
в данном случае достаточно определить
уравновешивающий
момент “Mу”
из условия равновесия моментов всех
сил, действующих на кривошип:
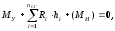
( 5.34 )
где: hi – плечи, на которых силы Ri создают крутящие моменты,
nСГ – количество структурных групп, присоединенных к кривошипу.
Слагаемое “MИ” поставлено в скобках т.к. оно учитывается или нет в зависимости от стадии, на которой производится силовой расчет (см. комментарии к уравнениям 5.30).
Реакцию R01 в опоре кривошипа найдем из условия равновесия в виде равенства нулю суммы всех сил, действующих на кривошип:

( 5.35 )
где: G1 – вес кривошипа.
Уравнение (5.35) можно решить графически, построив план сил (рис. 5.18б), или аналитически, составив систему уравнений равновесия спроецировав векторное уравнение (5.35) на оси НСК X0Y0, тогда:

( 5.36 )
Характерной особенностью данного варианта является то, что в опоре кривошипа не возникает дополнительных составляющих реакции, что можно отнести к достоинствам планетарных и волновых механизмов.
6. Уравновешивание механизмов
6.1. Постановка задач
При
работе механизмов центры масс звеньев
могут двигаться с ускорениями. Поэтому
возникают силы инерции:
( 6.1 )
где mi – масса i-го звена,aSi – ускорение его центра масс.
Например, для механизма на рис. 6.1 центры масс 2-го и 3-го звеньев имеют ускорения и возникают соответствующие силы инерции.
Эти
силы вызывают дополнительные реакции
в кинематических парах, что увеличивает
их износ. Кроме того, эти силы, переменные
по величине и направлению, являются
причиной вибраций, следовательно,
появляется опасность резонансных
явлений, которые могут привести к
авариям. И, наконец, эти силы воспринимаются
опорами механизма, через которые
передаются на стойку. Последнее явление
получило название внешней
виброактивности механизма.
Для таких устройств, как электро- и
бензопилы, дрели, отбойные молотки и
т.п. стойкой являются руки оператора, и
такие воздействия могут привести к
развитию так называемой вибрационной
болезни. Из всего сказанного следует,
что с этими воздействиями надо бороться.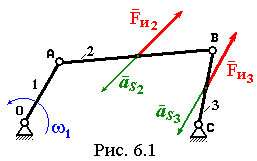
Мероприятия, направленные на уменьшение описанных сил или компенсацию их воздействия на кинематические пары называется уравновешиванием.
Различают два типа уравновешивания:
Статическое – компенсация воздействия сил инерции.
Моментное (иногда его называют динамическим) – компенсация воздействия моментов сил инерции.
Совокупность статического и моментного будем называть полным уравновешиванием.
Как статическое, так и моментное уравновешивание в свою очередь подразделяют еще на:
1. Уравновешивание при известном расположении неуравновешенных масс.
2. Уравновешивание при неизвестном расположении неуравновешенных масс.