

3.4.2. Функциональные механизмы
Поскольку эти механизмы проектируются для воспроизведения требуемой функции перемещения выходного звена, следовательно, функцию S() или () можно считать заданной. Дифференцируя эти зависимости, получают функции скорости и ускорения выходного звена, которые и используются для проектирования механизма, как это описано ниже.
Заметим, однако, что операция дифференцирования чувствительна к погрешностям в значениях функции. Если закон перемещения задан аналитически, то проблем с дифференцированием не возникает. Но если он задается таблицей значений, да еще может быть полученной экспериментально, то, как правило, требуется применение специальных методов, позволяющих уменьшить погрешности.
В частности, если такая таблица получена экспериментально, то обычно требуется произвести её сглаживание. Это можно сделать, например, с помощью сглаживающих сплайнов [6, 7, 15] или путем фильтрации [3, 11]. В указанной литературе рассматриваются отнюдь не кулачковые механизмы, но проблема сглаживания функций носит общий характер.
Сам процесс дифференцирования функций, заданных таблично имеет “подводные камни”. Как правило, требуется применение комбинированных методов. Например, если функция имеет участки с различным характером изменения, то на линейных участках надо применять обычный метод трапеций, а на криволинейных эффективно использование интерполяционных сплайнов. Методика такого дифференцирования описана в работе [15].
3.5. Угол давления в кулачковых механизмах
Углом
давления в кинематической паре называется
угол между вектором реакции со стороны
ведущего звена на ведомое, и вектором
скорости точки контакта, если считать
эту точку принадлежащей ведомому звену.
Это определение справедливо для
кинематических пар любого типа.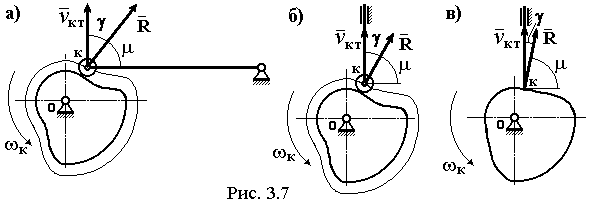
На рис. 3.7 показан угол давления для кинематических пар между кулачком и толкателем для различных типов механизмов с роликовым контактом и заостренным толкателем. Здесь мы будем рассматривать только такие механизмы, ввиду того, что для механизмов с плоским толкателем рассматриваемый вопрос не актуален, т.к. у таких механизмов угол давления в кинематической паре кулачок-толкатель всегда = 0.
Если не учитывать силу трения, то можно считать, что реакция R направлена по нормали к поверхности, в данном случае – к поверхности кулачка. Обратите внимание, что нормаль берется к центровому профилю кулачка, а точка контакта к – это конец толкателя или коромысла и ролик, даже если имеется, то не учитывается. vКТ – это скорость точки к, если считать её принадлежащей толкателю.
На рис. 3.7 показан также угол передачи , который является дополнительным до 90О к углу давления.
Угол давления является весьма важным параметром, т.к. если его величина превысит допускаемое значение, то КПД кинематической пары резко падает практически до нуля и кинематическую пару, а, следовательно, и весь механизм заклинивает. Предельно допустимыми значениями угла давления являются:
для механизмов с толкателем: [] = 30 … 32О,
для механизмов с коромыслом: [] = 45 … 50О.
Таким образом, условием незаклинивания является: [] для любого положения механизма. Соблюдение этого условия должно быть обеспечено еще на этапе проектирования механизма, а для этого необходимо выяснить какие размеры кулачкового механизма влияют на величину угла давления.