

3.6. Связь между углом давления и основными геометрическими параметрами кулачкового механизма
3.6.1. Механизм с толкателем центрального типа
Это
самый простой вариант. Расчетная схема
для него представлена на рис. 3.8, где n-n
– нормаль к профилю кулачка в точке
контакта кулачка и толкателя к,
-
– касательная к профилю кулачка в этой
же точке,
– угол
давления. Механизм изображен в некотором
промежуточном положении на фазе удаления.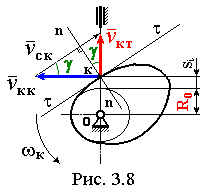
На рис. 3.8 изображен план скоростей механизма, на котором приняты следующие обозначения:
vКТ – скорость точки к, если считать её принадлежащей толкателю,
vКК – скорость точки к, если считать её принадлежащей кулачку,
vСК – скорость скольжения точки к толкателя по профилю кулачка. Направлена она параллельно касательной -, что является условием непрерывности контакта кулачка и толкателя.
По
построению имеем, что в данном положении:
( 3.4 )
где RO – радиус базовой окружности кулачка, si – перемещение толкателя в данном положении, Si’ – значение передаточной функции в данном положении3.
Выражение
(3.4) показывает, угол давления обратно
пропорционален радиусу базовой окружности
кулачка, т.е. увеличивая RO
можно уменьшать .
Разрешим выражение (3.4) относительно RO.
( 3.5 )
Если в правой части выражения (3.5) вместо текущего угла давления подставить его допускаемое значение, то в левой части получим минимально допустимый для данного положения радиус базовой окружности, т.е. такой при котором угол давления в данном положении механизма будет равен предельно допускаемому:
(
3.6 )
Тогда минимальный радиус базовой окружности кулачка, обеспечивающий незаклинивание в любом положении механизма:
ROmin = max { ROmin i } ( 3.7 )
i
Для надежного определения rOmin по формуле (3.7) rOmin I должны быть вычислены с достаточно мелким шагом по углу поворота кулачка.
3.6.2. Механизм с толкателем при наличии эксцентриситета
Расчетная
схема для этого случая представлена на
рис. 3.9, где, как и в предыдущем случае
n-n
– нормаль к профилю кулачка в точке к
контакта кулачка и толкателя, -
– касательная к профилю кулачка в этой
же точке,
– угол
давления. Механизм также изображен в
некотором промежуточном положении на
фазе удаления и построен план скоростей
механизма, на котором приняты те же
обозначения vКТ,
vКК,
vСК,
что и на рис. 3.8.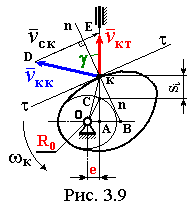
Выразим
тангенс угла давления для данного
положения механизма. По построению
имеем:
Для
определения величины OB
рассмотрим треугольники OкB
и кDE.
Они подобны как треугольники со взаимно
перпендикулярными сторонами. Из их
подобия следует:
Таким
образом, окончательно
( 3.8 )
Формула (3.8) показывает, что угол давления зависит и от радиуса базовой окружности кулачка RO и от эксцентриситета e, т.е. от основных геометрических параметров. Для этого случая уже не построить такой простой алгоритм, как для механизма центрального типа.