

3.7.3. Механизмы с коромыслом и роликом
Схема такого механизма представлена на рис. 3.1а. Для этих механизмов основными геометрическими параметрами являются: или пара (RO, L) или пара (RO, lк), где RO – радиус базовой окружности кулачка, L – межцентровое расстояние (между центром вращения кулачка и центром качания коромысла), lк – длина коромысла. Также, как для механизмов с толкателем и роликом или с заостренным толкателем здесь основные геометрические параметры определяют из условия ограничения угла давления [1, 14, 18]. Для механизмов рассматриваемого типа его предельно допускаемая величина обычно [] 45 … 50o. Превышение этих значений приводит к заклиниванию механизма, а условием незаклинивания является [] для любого положения механизма.
Сначала так же, как для механизмов с толкателем, найдем связь между углом давления и основными геометрическими параметрами.
На
рис. 3.12 представлена расчетная схема.
Найдем полюс зацепления P на пересечении
нормали к профилю кулачка n-n, и линии
центров ОО1.
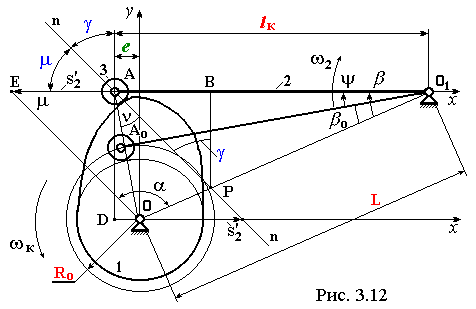
По оси коромысла О1A в масштабе чертежа отложим величину аналога скорости точки A:
(
3.15 )
где = О + – угол поворота коромысла, отсчитываемый от линии центров ОО1, – угол поворота коромысла, отсчитываемый от положения, соответствующего фазе ближнего выстоя, – угол поворота кулачка.
Проведем под углом передачи луч до пересечения с линией центров. По определению углов давления и передачи в точке пересечения должна находиться ось вращения кулачка. Из построенного таким образом ОО1E со сторонами
ОО1 = L
О1E = lк + s2’ = lк (1 + ’)
по теореме синусов найдем:
( 3.16 )
Заметим, что угол давления зависит от соотношения lк /L, от и ’. При заданном законе движения коромысла величины и ’ для каждого положения известны. Кроме того, отметим, что если центр вращения кулачка на рис. 3.12 сместить в любую точку ниже прямой OE, то угол передачи увеличится, а угол давления соответственно уменьшится.
В выражениях (3.16) в явном виде нет такого параметра как радиус базовой окружности кулачка RО. Но в неявном виде он там присутствует, т.к. угол зависит от угла О, а тот в свою очередь связан с RО соотношением, определяемым из ОО1AО по теореме косинусов:
RО2 = lк2 + L2 – 2 lк L cos О ( 3.17 )
Таким образом, выражения (3.16) и (3.17) дают связь угла давления с основными геометрическими параметрами рассматриваемого механизма. В отличие от случая механизма с толкателем, рассмотренного в подразделе 3.6 здесь не удается получить столь явную и удобную форму этой связи, но полученные результаты позволят построить методику определения параметров механизма, обеспечивающих его незаклинивание.
На
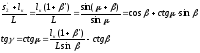
рис. 3.13 показаны расчетные схемы, с
помощью которых можно найти величины
RO
и L,
такие, что всегда будет выполнено условие
не заклинивания
[]
[14, 18 ] (рис. 3.13a – для механизмов с
геометрическим замыканием, рис. 3.13б
– с силовым).
Угловое перемещение коромысла как функцию угла поворота кулачка () и функцию ’() = d/d – аналога угловой скорости коромысла получают так, как это описано в п. 3.2. Величина s2’ = ’lк – аналог скорости точки А – конца коромысла – вектор, направление которого определяют, повернув вектор скорости точки А на 90 по направлению вращения кулачка, т.е. линия действия вектора ’lк совпадает с коромыслом ОА. Откладывая векторы ’lк от дуги AB – влево для фазы удаления, вправо – для фазы возврата и проведя через концы векторов плавную кривую, получим диаграмму ’lк ().
Найдем область возможных положений точки О – центра вращения кулачка. Пусть для некоторого угла поворота кулачка i угол поворота коромысла на фазе удаления i. Если через точку Di – конец вектора ’lк провести прямую - под углом [] = 90 – [] к вектору OiDi (см. рис. 4.8), то для данного угла i - – геометрическое место предельно возможных положений точки O. Если центр вращения кулачка будет располагаться на этой прямой, то в данном положении = [], если левее, то < [], если правее, то > []. Аналогично, для любого j-го положения на фазе возврата для механизма с геометрическим замыканием прямая 1-1 определяет геометрическое место предельно возможных положений точки O, но в этом случае < [], когда центр вращения кулачка правее прямой 1-1.
Для механизма с геометрическим замыканием (см. рис. 3.13а), проводя прямые - и 1-1 для всех рассматриваемых положений, выбирают такое их сочетание, когда величина AC будет наибольшей; такое сочетание и определит область возможных положений точки О.
Для механизма с силовым замыканием (см. рис. 3.13б), когда угол давления ограничивается лишь на фазе удаления, положение прямой 1-1 фиксировано (j = 0), а варьируется лишь положение -. Этот вариант является частным случаем предыдущего, поэтому рассмотрим вариант механизма с геометрическим замыканием как более общий.
Введем неподвижную систему координат OXY, направление оси X соответствует положению коромысла при = 0. Если угол поворота коромысла i на фазе удаления и уголj на фазе возврата соответствуют предельным положениям прямых - и 1-1 (см. рис. 3.13а), то искомые величины RO, L определяются после вычисления координат xC, yC точки C, которые найдем совместным решением уравнений прямых - и 1-1.
Уравнение прямой -
y = tg i (O1Hi – x), ( 3.18 )
где i = [] + i.
Выражая величину O1Hi через известные параметры, получим
y = lк (1+ ’i)( tg i cos i – sin i) – x tg i. ( 3.19 )
Аналогично, для прямой 1-1
y = tg j (x – O1Hj);
y = x tg j – lк (1+’j)( tg j cos j + sin j). ( 3.20 )
где j = [] – j.
Приравнивая правые части уравнений (3.19) и (3.20), найдем координату xC точки О:
xC = lк [(1+’i)(tg i cos i – sin i) + (1+’j)(tg j cos j + sin j)]/(tg i + tg j)
( 3.21 )
тогда координата yC – значение правой части выражения (3.19) при x = xC .
Точка А имеет координаты А(lк,0), следовательно,
 (
3.22 )
(
3.22 )
При проектировании кулачковых механизмов возможны ситуации, когда межцентровое расстояние L заранее выбрано из конструктивных соображений. В этом случае необходимо найти такой радиус RO, который позволил бы сохранить выбранное значение L. Очевидно, что решение будет получено, если найти координаты точек пересечения окружности радиуса L с центром в точке О1 с прямой - (L < O1C) или с 1-1 (L > O1C); при этом из двух точек пересечения прямой с окружностью следует выбирать точку с большим значением x. Если прямая и окружность заданы уравнениями y = ax + b; x2 + y2 = L2, то абсциссы xп1,2 точек их пересечения
 (
3.23 )
(
3.23 )
из двух значений xп выбираем большее, тогда yп = axп + b. Величины a и b вычисляются в соответствии с выражениями (3.19), (3.20):
( 3.24 )
Радиус базовой окружности в этом случае
 (
3.25 )
(
3.25 )
На практике обычно центр вращения кулачка точку O располагают внутри допустимой зоны (см. рис. 3.13), обеспечивая тем самым некоторый запас по углу давления. Если межцентровое расстояние L заранее не задано, то точку O целесообразно располагать на равном удалении от прямых -, 1-1. Расчет её положения аналогичен описанному выше расчету положения точки С, надо лишь параллельно сместить прямые -, 1-1 внутрь зоны. Обозначим: KC 1 – коэффициент запаса. Тогда формулы (3.19) . . . (3.22) примут вид [5]:
y = lк (KC+’i)( tg i cos i – sin i) – x tg i ,
y = x tg j – lк (1/ KC +’j)( tg j cos j + sin j), ( 3.26 )
xO = lк [(KC + ’i)(tg i cos i – sin i) +
+ (1/ KC + ’j)(tg j cos j + sin j)] / (tg i + tg j),

Таким образом, общая последовательность определения основных, габаритных параметров механизмов с коромыслом и роликом следующая. С достаточно мелким шагом строится диаграмма ’lк () как это показано на рис. 3.13. Определяется количество точек этой функции, находящихся на фазе удаления – n1, и на фазе возврата – n2. Для каждого сочетания i = 1,2, ... n1, j = 1,2, ... n2, производятся вычисления по формулам (3.19) … (3.22) и запоминается вариант с наибольшим значением ROmin. Если межцентровое расстояние L задано конструктивно, то RO определяют по формулам (3.23) … (3.25). В противном случае RO и L находят по зависимостям (3.26).
Если значение ROmin, полученное из условия ограничения угла давления, столь мало, что конструктивно не может быть реализовано, то в качестве ROmin принимают конструктивно допустимую величину, а L определяют так, чтобы центр вращения кулачка располагался в допустимой зоне.