

4.4. Общий случай движения твердого тела
В отличие от ранее рассмотренных движений предполагается, что тело может геометрически свободно двигаться в пространстве. Термин «общий случай движения» дан в связи с тем, что все иные типы движения твердого тела можно рассматривать как его частные случаи и все формулы как кинематики, так и динамики общего случая движения справедливы для любых типов движения твердого тела. Можно привести следующие примеры общего случая движения твердого тела:
полеты самолета, ракеты, снаряда, спутника относительно Земли;
качка корабля в воде относительно берегов;
галопирование подрессоренного корпуса автомобиля, самоходного орудия, танка и др. относительно грунта при езде по неровной дороге;
вибрации вращающегося ротора, установленного в упругих опорах, относительно корпуса;
движение груза, подвешенного на упругом
тросе, при движении стрелы. Движение
свободного твердого тела происходит
так, как если бы оно двигалось поступательно
со скоростью
![]() ,
равной скорости точки, принятой за
полюс, и вращалось
с мгновенной угловой скоростью
вокруг этого полюса как вокруг неподвижной
точки (рис.4.25). Свободное
тело имеет шесть
степеней свободы относительно
неподвижной системы отсчета и связанной
с ней неподвижной системы координат
OXYZ.
Подвижную
систему
координат
,
равной скорости точки, принятой за
полюс, и вращалось
с мгновенной угловой скоростью
вокруг этого полюса как вокруг неподвижной
точки (рис.4.25). Свободное
тело имеет шесть
степеней свободы относительно
неподвижной системы отсчета и связанной
с ней неподвижной системы координат
OXYZ.
Подвижную
систему
координат
![]() свяжем с произвольной точкой Р,
называемой в дальнейшем полюсом,
последняя перемещается поступательно
и оси которой остаются параллельными
осям неподвижной системы OXYZ.
Положение
системы
относительно OXYZ
может быть
задано, например, с помощью декартовых
координат полюса Р.
Относительно
подвижной системы
тело совершает сферическое движение
(в этой системе точка Р
неподвижна).
Пространственная ориентация осей
системы Рxyz
может быть задана, например, тремя углами
Эйлера (рис.4.25). Таким образом, совокупность
уравнений (4.42)
свяжем с произвольной точкой Р,
называемой в дальнейшем полюсом,
последняя перемещается поступательно
и оси которой остаются параллельными
осям неподвижной системы OXYZ.
Положение
системы
относительно OXYZ
может быть
задано, например, с помощью декартовых
координат полюса Р.
Относительно
подвижной системы
тело совершает сферическое движение
(в этой системе точка Р
неподвижна).
Пространственная ориентация осей
системы Рxyz
может быть задана, например, тремя углами
Эйлера (рис.4.25). Таким образом, совокупность
уравнений (4.42)
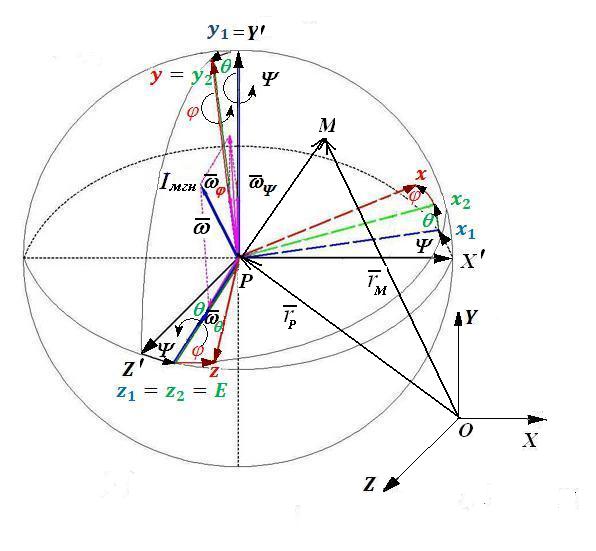
Рис.4.4.1
![]()
![]()
![]() (4.42)
(4.42)
определяющих зависимость обобщенных координат тела от времени, называют законом свободного движения тела, или уравнениями его движения.
Три декартовы координаты полюса Р и три угла Эйлера, являются обобщенными координатами тела в системе OXYZ.
Приведенный вариант обобщенных координат не является единственным. Вместо декартовых координат точки Р можно ввести, например, вместо углов Эйлера иную систему углов, например, корабельные углы Крылова или самолетные углы вращения.
Для радиус-вектора произвольной точки М тела относительно неподвижной точки О справедлива зависимость (рис.4.25)
![]() (4.42)
(4.42)
где
![]()
радиус-вектор
полюса P,
а
постоянный по модулю радиус-вектор
точки M относительно
полюса P.
Продифференцировав
по времени уравнение (4.42), получим
формулу, определяющую скорость
произвольной точки M
для любого момента времени в общем
случае движения твердого тела,
радиус-вектор
полюса P,
а
постоянный по модулю радиус-вектор
точки M относительно
полюса P.
Продифференцировав
по времени уравнение (4.42), получим
формулу, определяющую скорость
произвольной точки M
для любого момента времени в общем
случае движения твердого тела,
![]() (4.43)
(4.43)
Продифференцировав по времени уравнение (4.43), получим
 ,
,
Так как вектор
жестко связан с твердым телом и его
модуль постоянен, слагаемое
 может быть вычислено по формуле Ривальса
(4.37):
может быть вычислено по формуле Ривальса
(4.37):  =
=![]() .
.
Тогда ![]() ,
(4.44)
,
(4.44)
где
![]() и
и
![]()
![]() соответственно
вращательное и осестремительное
ускорения точки М при ее движении
вокруг полюса Р вследствие сферического
движения тела относительно системы
координат
.
Величины и направления этих векторов
были определены ранее:
соответственно
вращательное и осестремительное
ускорения точки М при ее движении
вокруг полюса Р вследствие сферического
движения тела относительно системы
координат
.
Величины и направления этих векторов
были определены ранее:
![]() (4.39), и
(4.39), и
![]() (4.40).
(4.40).
При известном законе движения тела (см.4.42) формула (4.44) позволяет рассчитать ускорение произвольной точки М тела для любого момента времени на заданном интервале.