

Частный случай задания движения точки в полярной системе координат
Полярная система координат может быть использована в случае
д вижения
точки в некоторой плоскости, в которой
выбирают расположе
вижения
точки в некоторой плоскости, в которой
выбирают расположе
Рис.1.4
ние полярной оси Оl (луча, проведенного на плоскости из некоторого
полюса О, неизменно связанных с
выбранной системой отсчета). Положение
точки в ней определяются скалярными
величинами
![]() и
и
(рис 1.4). Полярная координата скалярный параметр, равный длине отрезка ОМ, т.е. расстоянию от начала координат (полюса О) до точки М. Полярный угол это угол между полярной осью и линией
ОМ. При отсчете угла за положительное принимают направление, противоположное направлению движения часовой стрелки.
Ортами полярной системы координат,
составляющими ее базис, являются
единичные векторы
![]() и
и
![]() (рис 1.4). Первый из них
задает положительное направление
радиальной оси Or
и направлен из начала координат O
к точке М. Второй из них
определяет положительное направление
трансверсали, т.е. поперечной
оси Op, перпендикулярной
радиальной оси, и находится путем
поворота на 90
против направления движения часовой
стрелки. Орты полярной системы координат
и
являются подвижными, изменяющими свое
направление с изменением угла
.
(рис 1.4). Первый из них
задает положительное направление
радиальной оси Or
и направлен из начала координат O
к точке М. Второй из них
определяет положительное направление
трансверсали, т.е. поперечной
оси Op, перпендикулярной
радиальной оси, и находится путем
поворота на 90
против направления движения часовой
стрелки. Орты полярной системы координат
и
являются подвижными, изменяющими свое
направление с изменением угла
.
Для задания движения точки в полярной системе координат необходимо иметь уравнения движения в виде
![]() (1.5)
(1.5)
Система уравнений (1.5) является одновременно
параметрической формой записи уравнения
траектории точки. Для получения уравнения
траектории точки в канонической форме
![]() ,
необходимо из (1.5) исключить время t.
В полярной системе координат радиус-вектор
точки, приведенный из центра O,
равен
,
необходимо из (1.5) исключить время t.
В полярной системе координат радиус-вектор
точки, приведенный из центра O,
равен
![]() ,
и согласно (1.5), выражается как
,
и согласно (1.5), выражается как
![]() (1.6)
(1.6)
Последнее уравнение (1.6) соответствует векторному уравнению движения точки в форме (1.1).
1.1.3. Траекторный (естественный) способ задания движения точки
Если известна траектория движения точки относительно выбранной системы отсчета (т.е. определена или графически, или с помощью уравнения или другим способом), то такой способ задания движения точки называется траекторным или (естественным) способом. Для однозначного определения положения точки в пространстве в любой момент времени необходимо:
зафиксировать на траектории точку H – начала отсчета траекторной координаты,
выбрать положительное и отрицательное направление траекторной координаты,
указать закон движения точки по траектории в виде
s = s (t). (1.7)
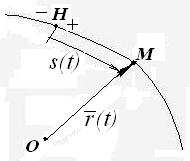 Рис.1.5
Рис.1.5
Скалярный параметр s имеет смысл криволинейной (дуговой) координаты и называется траекторной координатой. Определение: траекторной координатой точки, отвечающей данному моменту времени t, называется отрезок дуги траектории, взятый со знаком «+» или «» в зависимости от того, по какую сторону от начала отсчета (точки H) находится точка M на траектории, величина (модуль) которого определяется расстоянием по траектории от (точки H) - начала отсчета траекторной координаты до текущего положения точки M (рис.1.5).
В выбранной системе отсчета, в которой определена в рассматриваемом случае траектория движения точки (рис.1.5), можно установить однозначную связь между значениями траекторной координаты s и радиус-вектором r точки M. Функциональная зависимость радиус-вектора точки от параметра s может быть представлена как
![]() .
(1.8)
.
(1.8)
Введем новое определение, (рис.1.6) назовем
его вектором
![]() перемещения точки, отвечающему
данному промежутку времени Δt,
это закрепленный вектор, начало и конец
которого совпадают с положениями точки
в начале и в конце рассматриваемого
промежутка времени Δt.
перемещения точки, отвечающему
данному промежутку времени Δt,
это закрепленный вектор, начало и конец
которого совпадают с положениями точки
в начале и в конце рассматриваемого
промежутка времени Δt.