

Кинематика
_____________________________________________________________________________________________________
Кинематика раздел теоретической механики, в котором изучается механическое движение тел независимо от взаимодействия между ними (с геометрической точки зрения).
Под механическим движением понимают перемещение в пространстве и во времени одних тел относительно других. Те тела, относительно которых рассматривается движение, называются системами отсчета. С системой отсчета связывают систему координат, в которой рассматривают перемещение исследуемого материального тела или системы тел с течением времени. Начало отсчета времени выбирают произвольно.
Задать движение материального тела - это значит иметь возможность однозначно определить положение рассматриваемого материального тела и любой его точки относительно выбранной системы отсчета в любой момент времени.
Вот почему мы начинаем изучение данного раздела с кинематики точки, а потом переходим к изучению кинематики твердого тела. Простейшей моделью материального тела, формой, размерами и вращательным движением которого в условиях рассматриваемой задачи можно пренебречь по сравнению с его поступательным движением является материальная точка. Абсолютно твердым, или просто твердым, телом называется такое тело (совокупность системы материальных точек), расстояние между любыми точками которого неизменно.
Кинематика точки
Способы задания движения точки
Кинематика точки раздел кинематики, в котором изучается механическое движение материальной точки и основных ее кинематических характеристик: траектории движения точки, как геометрического места последовательных (с течением времени) положений точки в пространстве относительной выбранной системы отсчета; скорости и ускорения точки.
Существует несколько способов задания движения точки. Сущест-венными среди них являются векторный, координатный и траектор-ный. Кинематические характеристики точки для трех случаев задания ее движения приведены в табл.1.1.
Все три способа взаимосвязаны, т.е. возможен переход от одного способа задания движения точки к другому.
Векторный способ задания движения точки
 Для
задания движения точки векторным
способом необходимо выразить ее радиус
- вектор в виде функции времени относительно
выбранной
Для
задания движения точки векторным
способом необходимо выразить ее радиус
- вектор в виде функции времени относительно
выбранной
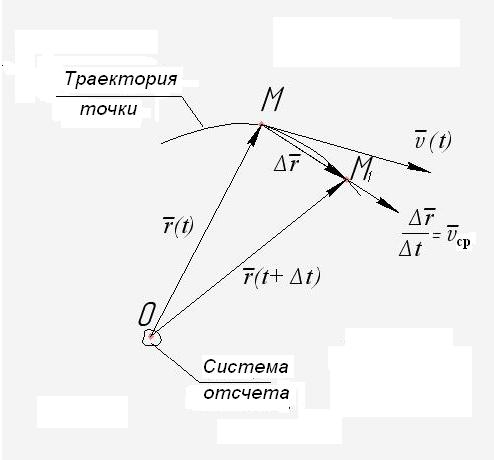
Рис.1.1
системы отсчета из неподвижной точки О
![]() ,
(1.1)
,
(1.1)
Функция
![]() предполагается
непрерывной и дважды дифференцируемой.
Траекторию точки можно определить
как годограф ее радиус- вектора (рис.1.1),
т.е. геометрическое место концов
радиус-вектора
предполагается
непрерывной и дважды дифференцируемой.
Траекторию точки можно определить
как годограф ее радиус- вектора (рис.1.1),
т.е. геометрическое место концов
радиус-вектора
![]() ,
изменяющегося во времени согласно
зависимости (1.1). Векторный способ
задания движения точки в виду своей
простоты в дальнейшем широко используется
для определения кинематических
характеристик и при других способах
задания ее движения.
,
изменяющегося во времени согласно
зависимости (1.1). Векторный способ
задания движения точки в виду своей
простоты в дальнейшем широко используется
для определения кинематических
характеристик и при других способах
задания ее движения.
Координатный способ задания движения точки
Д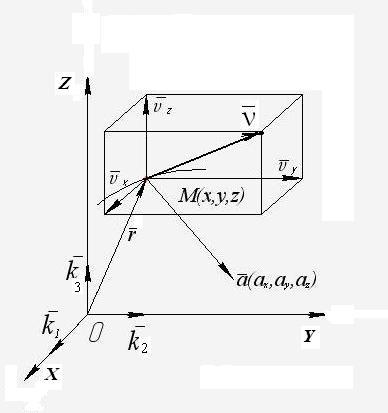 ля
задания движения точки координатным
способом необходимо ввести прямоугольную
декартову систему координат, неизменно
связанную с выбранной системой отсчета,
с началом в точке O
и осями OXYZ (рис.1.2) и
дать зависимости изменения координат
точки в виде функций времени. Эти
зависимости во всех далее рассматриваемых
случаях предполагаются непрерывными
и дважды дифференцируемыми и называются
ля
задания движения точки координатным
способом необходимо ввести прямоугольную
декартову систему координат, неизменно
связанную с выбранной системой отсчета,
с началом в точке O
и осями OXYZ (рис.1.2) и
дать зависимости изменения координат
точки в виде функций времени. Эти
зависимости во всех далее рассматриваемых
случаях предполагаются непрерывными
и дважды дифференцируемыми и называются
Рис. 1.2
кинематическими уравнениями движения точки
![]() ,
,
![]() ,
,
![]() (1.2)
(1.2)
Зависимости (1.2) одновременно являются и уравнениями траектории точки в параметрической форме, где параметром является время t.
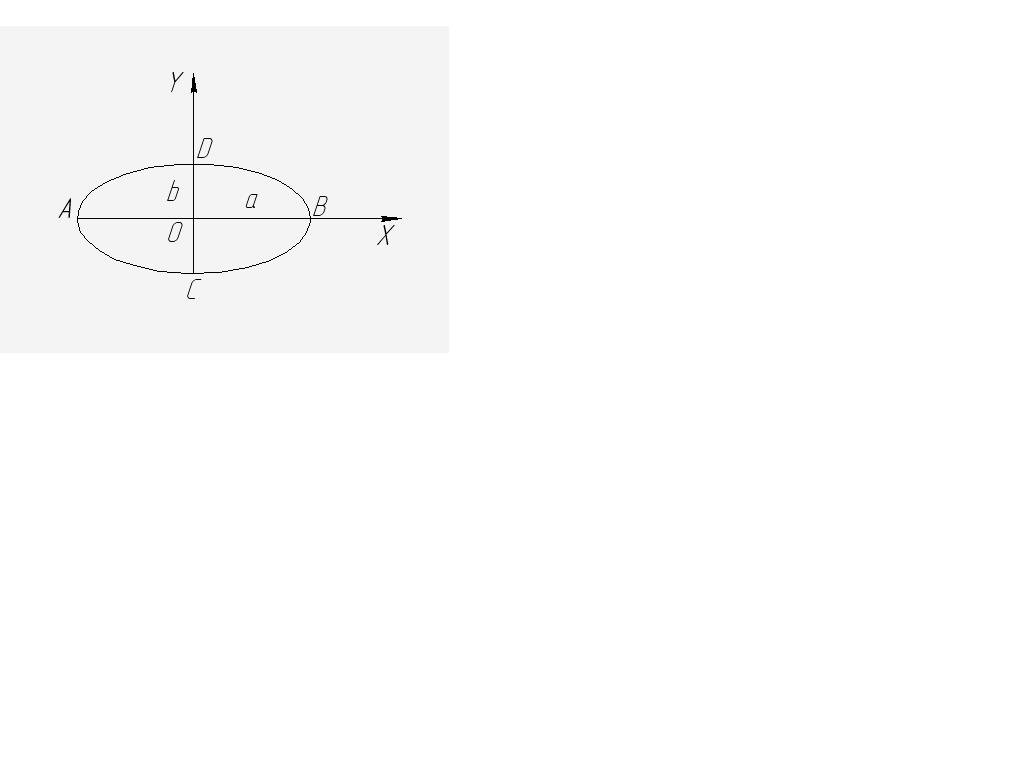
Для получения уравнения траектории точки в каноническом виде, т.е. в форме непосредственной зависимости между координатами x, y, z, из системы уравнений (1.2) необходимо исключить время t. В частном случае задания движения точки на плоскости OXY, например, в виде уравнений движения x = a cos kt, y = b sin kt, z = 0 (параметрическое задание) уравнение траектории точки в канонической форме будет:
![]()
 ,
,
![]()
![]()
![]() - уравнение эллипса (координат
- уравнение эллипса (координат
Рис. 1.3
ные оси совпадают с осями эллипса), большая ось которого АВ = 2а, малая ось СD = 2b , вершины A, B, C, D (рис. 1.3). Следует также заметить, что траекторией точки может быть не вся кривая, описываемая (1.2), а только часть ее, соответствующая реализуемому процессу и времени t (время всегда положительно).
Между векторным и координатным способами
задания движения точки существует
следующая зависимость (рис.1.1). Проведем
из начала декартовой системы координат
радиус-вектор
точки М и выразим его через
координаты точки и орты
![]() ,
,
![]() ,
,
![]() этой системы координат, составляющие
ее векторный базис. С учетом уравнений
(1.2) имеем:
этой системы координат, составляющие
ее векторный базис. С учетом уравнений
(1.2) имеем:
=![]()
+
+![]() +
+![]() . (1.3)
. (1.3)
Из (1.3) следует, что координаты точки есть проекции ее радиус-вектора на оси декартовой системы координат, т.е.
x = , y = , z = . (1.4)