

4.2. Углы Эйлера
В тех случаях, когда угловая скорость
вращения твердого тела в одном направлении
значительно больше, чем в двух других
(генераторы,
тех случаях, когда угловая скорость
вращения твердого тела в одном направлении
значительно больше, чем в двух других
(генераторы,
Рис.4.10

Рис.4.11
моторы, турбины, гироскопы, снаряды), для определения положения тела в качестве трех независимых параметров выбирают три угла Эйлера: угол прецессии (t), угол нутации (t) и угол ротации (собственного вращения) (t). Их названия заимствованы из астрономии.
Чтобы задать эти углы, рассмотрим вращение твердого тела вокруг неподвижной точки О. Пусть даны некоторая система отсчета и связанная с ней неподвижная система координат ОXYZ, относительно которой движется твердое тело, и связанная с твердым телом система координат
Оxyz, которая движется относительно первой (рис.4.10 4.13). Это означает, что первая и вторая системы координат имеют общее начало O. Так, рассматривая кинематику частей лафета орудия (рис.4.11), за начало выбирают точку О пересечения оси вращения боевого штыря с горизонтальной плоскостью, перпендикулярной плоскости симметрии орудия, на
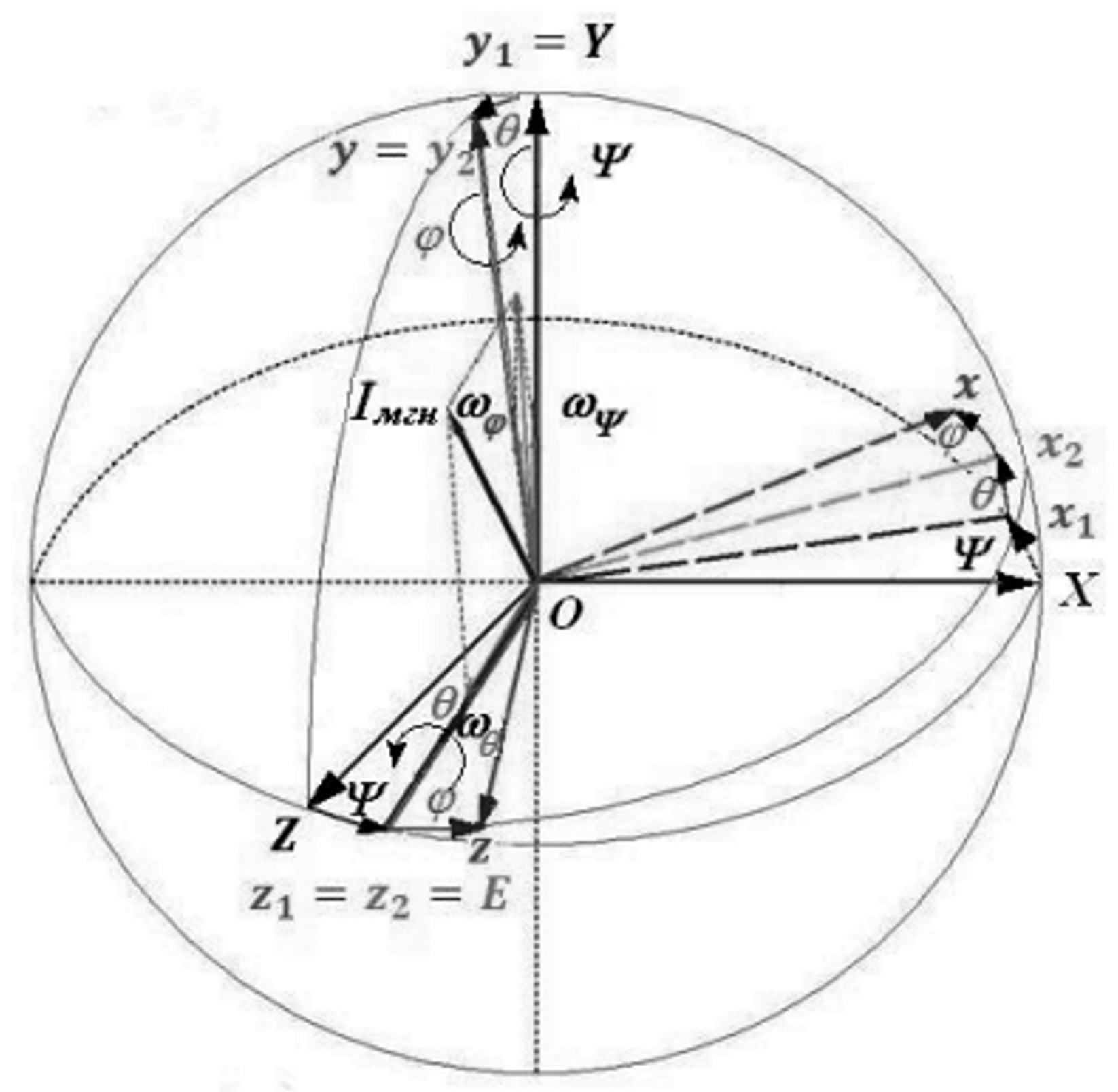
Рис.4.12
высоте оси цапф до выстрела. Ось ОX –направляем горизонтально, ее ориентацию целесообразно связывать с направлением полета снаряда, когда плоскость стрельбы совпадает с плоскостью симметрии орудия, т.е. это продольная ось в плоскости симметрии (ракеты, орудия, танка при нулевом угле возвышения); ось OY- будет ориентировать вертикально положительное направление вверх. Ось OZ –вправо для наблюдателя, смотрящего вдоль оси ОX. (рис.4.10, рис.4.12). Углы, образуемые осями Оxyz с осями ОXYZ, изменяются, т.е. система Оxyz поворачивается вместе с твердым телом вокруг неподвижной точки О (рис.4.10, рис.4.12).
П лоскость
ОXZ (заштрихованный
овал) пересекает плоскость Оxz
(белый овал) по некоторой (рис.4.13) прямой
Оz1
=Оz2 =
OE, образующей угол
лоскость
ОXZ (заштрихованный
овал) пересекает плоскость Оxz
(белый овал) по некоторой (рис.4.13) прямой
Оz1
=Оz2 =
OE, образующей угол
![]() с неподвижной осью ОZ,
и угол
с подвижной осью Оz,
которая называется «линией узлов»
ОЕ с единичным ортом
с неподвижной осью ОZ,
и угол
с подвижной осью Оz,
которая называется «линией узлов»
ОЕ с единичным ортом
![]() .
.
Рис.4.13
Кроме того, плоскость Оxz образует с плоскостью ОXZ угол , равный углу между осями ОY и Оy.
Неподвижная ось ОY,
вокруг которой поворачивается
твердое тело на угол прецессии ,
называется осью прецессии с единичным
ортом
![]() .
.
Изменение угла нутации
сопровождается вращением твердого
тела вокруг линии узлов Оz2
, называемой осью нутации
![]() с единичным ортом
с единичным ортом
![]() (рис.4.12; 4.13).
(рис.4.12; 4.13).
Наконец, угол ротации (собственного
вращения)
характеризует вращение тела вокруг
оси Oy = Oy2,
называемой осью ротации (собственного
вращения) с единичным ортом
![]() .
.
На рис (4.10 - 4.13) все углы положительные, т.е. против хода часовой стрелки, если смотреть на поворот тела с положительных направлений осей вращения OY, OE и O y.
Движение твердого тела в любой момент
времени полностью определяется положением
подвижной связанной с твердым телом
системы координат Оxyz
относительно неподвижной системы
координат ОXYZ,
т.е. заданием кинематических уравнений
вращения тела вокруг неподвижной точки
О: угла прецессии
![]() ,
угла нутации
,
угла нутации
![]() и угла ротации
и угла ротации
![]() (собственного вращении).
(собственного вращении).