

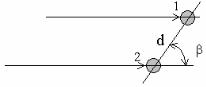
Например, при облучении двух целей, изображенных на рис.2.4, ЭПО
|
Sэ=4Sэ1 cos |
2 |
|
2πd cosβ |
|
определяется уравнением |
|
|
|
, |
|
|
λ |
||||
|
|
|
|
|
|
где Sэ1- ЭПО одного объекта.
Рис.2.4.
Отсюда следует важный вывод – при изменении взаимного положения первой и второй цели, могут изменяться β и d и тогда Sэ может изменяться от нуля до четырехкратного значения Sэ1.
2.3. ЭПО судов
Суда относятся к радиолокационным объектам сложной формы (корпус судна, мачты, трубы, надстройки, такелаж и др.). Поэтому СВЧ сигналы, отраженные от судна представляют собой результат интерференции большого количества колебаний, имеющих различные фазы и амплитуды.
ЭПО изменяется также и во время движения судна, при качке, изменении курса и т.п. ЭПО максимальна со стороны бортов и ее значение пропорционально площади сечения судна в диаметральной плоскости, и минимальна с носа и кормы. При этом ЭПО пропорциональна площади сечения в плоскости шпангоутов наибольшей ширины судна.
Для наглядности ЭПО представляют в виде ее зависимости от углов облучения объекта в полярной системе координат. Например,
на рис.2.5 показана диаграмма отражения |
(ЭПО) комплекта |
отражателей, изображенного на рис.2.3. |
|
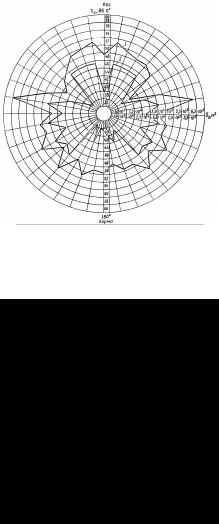
Рис.2.5. Пример изображения диаграммы ЭПО комплекта отражателей
В качестве примера, на рис.2.6 показана ЭПО в полярной системе координат танкера водоизмещением 10000 т при разных ракурсах облучения [1].
Рис.2.6.Пример изображения диаграммы ЭПО танкера
Диаграмма снималась в натуральных условиях, при спокойной поверхности моря, на расстоянии 7 миль, волнах λ1=8мм (кривая 1) и
λ2=3,2см (кривая 2).
В табл. 1 приведены ориентировочные данные среднего значения эффективной поверхности отражения (рассеяния) для
некоторых типов судов, знаков навигационного ограждения и других объектов в диапазоне сантиметровых волн, а также ориентировочные данные высоты объектов. Пользуясь приведенными данными, можно вычислить средние значения дальности радиолокационного наблюдения соответствующих целей или объектов.
|
|
|
|
Табл.1. |
|
Средние значения эффективной поверхности отражения |
|||||
объектов вдиапазонесантиметровыхволн |
|
|
|||
|
|
|
|
|
|
|
Тип объекта |
Sэ, м2 |
h, м |
||
|
|
|
|
|
|
|
Катер |
|
75—250 |
2—4 |
|
|
|
|
|
|
|
|
Буксир |
|
250—750 |
4—6 |
|
|
|
|
|
|
|
|
Траулер |
|
750—4. 103 |
6—8 |
|
|
|
|
|
||
Судно малого тоннажа |
4. 103— 12.103 |
8—10 |
|
||
|
|
|
|
|
|
Судно |
среднего |
тоннажа |
12.103— 3.104 |
10—14 |
|
|
|
|
|
|
|
Судно |
большого |
тоннажа |
3.104—5.104 |
14—20 |
|
|
|
|
|
|
|
Буй |
без отражателя |
1—10 |
1—2 |
|
|
|
|
|
|
|
|
|
Человек |
|
0,8 |
|
|
|
|
|
|
|
|
2.4. ЭПО распределенных объектов
Распределенными называются объекты, размеры которых превышают линейные размеры радиолокационного луча на местности.
Делятся на поверхностные и объемные.
Поверхностные - это участки водной поверхности, суши. Отражение от поверхностных объектов (целей) может быть
зеркальным и рассеянным.
Условием зеркальной поверхности (см. рис.2.7) является
выполнение соотношения |
h |
λ |
. |
|
8sinβ |
||||
|
|
|
В этом случае отражение практически подчиняется оптическим законам, то есть угол падения β равен углу отражения.
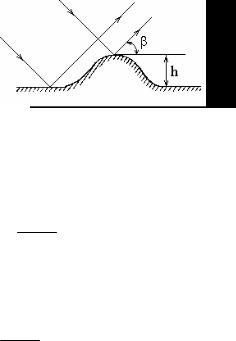
Рис.2.7.
Поэтому отраженная радиоволна, как правило, на антенну НРЛС не возвращается (за исключением нормально падающей радиоволны).
При зеркальном отражении СВЧ энергия в приемник НРЛС не поступает.
Если же h 8sinλ β - это шероховатая поверхность, создающая
так называемое рассеянное отражение. При рассеянном отражении радиоволны распространяются в разные направления, и часть отраженной энергии поступает в приемник НРЛС.
На дальних расстояниях (то есть угол β минимален) правая часть уравнения h 8sinλ β увеличивается, а h уменьшается. Таким
образом, на больших расстояниях волнение от моря сказывается не существенно, в то время как на малых расстояниях (0 ÷ 6)миль –
волнение сказывается существенно.
ЭПО водной поверхности.
Зависит от разрешающей площадки НРЛС (см. уравнение 12) и коэффициента направленности отражающей поверхности в направлении антенны НРЛС. Определяется уравнением
Sэ=Sр G = G αD |
cτЗИ |
, |
(33) |
|
|||
2 |
|
|
|
где: Sр - разрешающая площадка НРЛС;
G-коэффициент направленности отражающей поверхности в направлении антенны НРЛС. Его величина зависит от степени волнения (высоты и направления волны) и может изменяться от 0 до
1.
Из уравнения (33) следует, что помехи от взволнованной поверхности могут быть снижены путем увеличения разрешающей
способности НРЛС, то есть использованием зондирующих импульсов малой длительности и применение антенн с более узкой шириной диаграммы направленности в горизонтальной плоскости.
Объемными распределенными объектами являются совокупность большого числа элементарных отражателей, заполняющих некоторый объем, воспроизводимых радиолокатором как один объект. К таким объектам относятся взвешенные в атмосфере жидкие и твердые частицы (дождь, град, туман, грозовые облака и др.).
ЭПО объемного объекта равна произведению числа элементарных отражателей, заключенных в данном объеме, в котором они воспринимаются как один объект, на эффективную площадь рассеяния одного элементарного отражателя.
ЭПО объемной цели определяется уравнением
So=SкNVp , |
(34) |
где: Sк— ЭПР одной элементарной цели (например - дождевой капли);
N — количество элементарных целей в разрешающем объеме;
Vр — общий объем, в котором все элементарные цели воспринимаются как один объект (см. уравнение 13).
Тогда ЭПО объемной цели равняется:
So=SкN αD2cτЗИtg |
θ . |
(35) |
|
2 |
|
Если, например, в зоне дождя находится какой-либо объект, например судно, то отражение от дождевых капель может создать значительную помеху на экране индикатора для распознания отраженного от судна сигнала. Эту помеху можно несколько снизить укорочением длительности импульсов РЛС и использованием
антенны с большей направленностью (меньшим углом αг). При этом мощность сигнала от судна практически не снизится, а мощность помех из-за отражения от дождевых капель уменьшится.
Помехи от дождевых капель можно также значительно уменьшить, применяя для облучения объектов электромагнитное поле с круговой поляризацией.
На практике поле с круговой поляризацией получают с помощью специальной поляризационной решетки из четвертьволновых металлических пластин, расположенных под углом 45° к вектору электрической составляющей поля падающей линейно
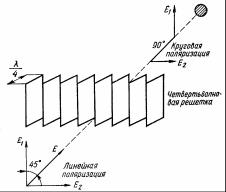
поляризованной волны (рис. 2.8). Такая решетка размещается обычно
враскрыве рупорной антенны [12].
Вэтом случае падающая волна разлагается на две взаимно перпендикулярные линейно поляризованные составляющие поля с одинаковой амплитудой.
Рис.2.8.
Одна из составляющих будет ориентирована параллельно пластинам решетки, а вторая - перпендикулярно. Последняя сквозь пластины решетки проходит свободно. Для параллельной составляющей поля пластины решетки представляют волновод. Поскольку фазовая скорость поля в волноводе больше, чем в свободном пространстве, при прохождении через решетку параллельная составляющая поля будет опережать по фазе перпендикулярную составляющую. Величина фазового сдвига между полями будет зависеть от расстояния между пластинами и размера пластин решетки в направлении распространения радиоволн. Эти размеры выбираются таким образом, чтобы на выходе решетки параллельная составляющая опережала перпендикулярную составляющую поля на угол 90°. Тогда после прямого прохождения решетки линейно поляризованное поле антенны преобразуется в поле с круговой поляризацией, поскольку между составляющими поля имеет место пространственный и фазовый сдвиг на 90°.
После отражения энергии от дождевых капель или иных объектов сферической формы параллельная составляющая поля, проходя решетку в обратном направлении, получит дополнительное опережение по фазе на 90° относительно перпендикулярной составляющей отраженного поля. Тогда на входе антенны РЛС обе составляющие взаимно компенсируются, так как их амплитуды при