

1.Назначение и особенности радионавигационных систем
Радионавигация – это вождение движущихся объектов (судов, летательных аппаратов) с использованием радиотехнических систем.
Всудовождении много столетий основное применение имели астрономические и другие навигационные приборы, а также визуальная ориентировка наблюдения. Однако низкие точности вождения и зависимость определения места судна от погодных и других факторов ограничивали возможность флота и, особенно, авиации. Поэтому, уже на ранних этапах развития радиотехники возникли предложения по ее использованию для целей навигации. Начали создаваться так называемые радионавигационные системы (РНС), которые явились вторыми после радиосвязи системами, определившими дальнейшее развитие радиотехники.
Необходимая навигационная информация (широта - φ,
долгота - λ, скорость и курс судна, высота приемной антенны, при работе со спутниковой навигационной системой, относительно выбранного геоида) обеспечивается различными техническими средствами судовождения, основными их которых являются РНС.
Под радионавигационной системой (РНС) подразумевается радиотехнический комплекс, состоящий их синхронизированных между собой наземных или космических излучателей (передатчиков)
ибортовых приемников, размещенных как на борту подвижного объекта, так и вне него.
Радионавигационная система имеет определенную зону действия — область пространства, в пределах которой она может обеспечивать подвижный объект навигационной информацией с допустимой погрешностью.
Взаимосвязь этих устройств осуществляется с помощью электромагнитных колебаний – радиоволн, которые связывают в единую систему всю радиоаппаратуру, часть из которой обычно располагается на борту судна, а часть – в нескольких опорных наземных радионавигационных точках – навигационных ориентирах (НО) с известными с высокой точностью координатах или же на космических аппаратах.
Воснове построения всех современных РНС лежит свойство
радиоволны распространяться в свободном пространстве по кратчайшему пути с конечной скоростью (Vp≈ 3·108м/с) значение которой предполагается известным применительно к данным условиям. Поэтому, используя излучатели как навигационные ориентиры с известными координатами, можно решить задачу
местоопределения объекта посредством измерения в его бортовом приемоиндикаторе (ПИ) той или иной совокупности параметров (параметра) специальным образом сформированного излучателями высокостабильного электромагнитного поля.
Тот параметр радионавигационного поля, в результате измерения которого в ПИ выделяется необходимая навигационная информация, носит название радионавигационного параметра (РНП).
Радионавигационным параметром может быть любой из параметров радионавигационного (электромагнитного) поля. Радионавигационное поле, как и всякое электромагнитное, характеризуется амплитудой, частотой, фазой, а также временем прихода сигнала в ПИ. Соответственно возможно создание
амплитудных, фазовых, частотных и временных
радионавигационных систем, если значения соответствующих параметров поля являются функцией навигационного параметра.
В свою очередь геометрическая величина, определяющая местоположение объекта в пространстве и связанная с радионавигационным параметром известной аналитической зависимостью, называется навигационным параметром (НП).
Геометрическое место точек, соответствующее конкретному значению НП, образует некоторую изоповерхность.
Очевидно, что вид изоповерхности определяется используемым в данной РНС навигационным параметром. Пересечение двух изоповерхностей, определяемых двумя полученными значениями НП, образует изолинию. Отсюда следует, что для обеспечения трехмерной навигации с координатами, например широта, долгота, высота над некоторой уровенной поверхностью, минимальное количество образуемых в пространстве изоповерхностей должно быть равно трем. Наличие избыточных изоповерхностей позволяет существенно повысить точность определения места объекта при надлежащей обработке измерений в бортовых ПИ.
При обеспечении навигационной информацией морских объектов в качестве одной из изоповерхностей в большинстве случаев используют уровенную поверхность океана, что сокращает количество необходимых НО при одновременных измерениях, а также сводит задачу местоопределения судна к получению двух изолиний на поверхности Земли.Имеются два основных режима работы РНС: активный и пассивный.
Активный режим – судовая аппаратура содержит устройства, излучающие радиоволны. Примером такой РНС является радиолокационная станция.
Пассивный режим – на борту подвижного объекта не требуется устанавливать излучающую аппаратуру.
1.1.Классификация РНС
Воснову классификации РНС, работающих в пассивном режиме, положены различные признаки, основными из которых можно выделить следующие:
вариант размещения аппаратуры РНС; вид используемого навигационного параметра или, что
эквивалентно, вид создаваемых изолиний в зоне действия системы; вид измеряемого в ПИ радионавигационного параметра; рабочий диапазон радиоволн; дальность действия системы.
В соответствии с первым из приведенных признаков все РНС можно подразделить на РНС наземного базирования излучателей (передатчиков) и излучателей, размещенных на космических
аппаратах, которые образуют так называемые |
спутниковые |
радионавигационные системы (СРНС). |
|
В соответствии со вторым признаком классификации РНС делят на дальномерные, псевдодальномерные, разностно-дальномерные, радиально-скоростные системы. Возможно использование комбинаций этих методов [1,2].
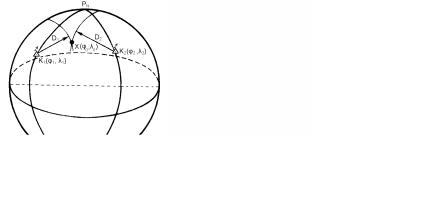
Дальномерный способ местоопределения в морской
Рис.1.1. Пример дальномерного способа определения места
радионавигации основан на измерении минимум двух дальностей Di (i=l,2) до двух навигационных ориентиров K1 и К2, (рис.1.1)
имеющих географические координаты соответственно φ1, λ1 и φ2, λ2 .
Изолинии в этом случае являются окружностями (если поверхность Земли считать сферической), и задача местоопределения судна сводится к решению двух нелинейных уравнений:
cosD1 = sinϕ1 sinϕo +cosϕ1 cosϕo cos(λ1 −λo ) ; |
(1) |
|||||||||||||||
cosD = sinϕ |
2 |
sinϕ |
o |
+cosϕ |
2 |
cosϕ |
o |
cos(λ |
2 |
−λ |
o |
) |
||||
2 |
|
|
|
|
|
|
|
|
|
|
||||||
относительно неизвестных координат φо и |
λо точки Х расположения |
|||||||||||||||
бортового ПИ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Этот метод |
ранее |
использовался |
в |
|
радиопеленгаторных |
|||||||||||
системах и некоторых спутниковых навигационных системах, например, в американской СНС «Транзит» (искусственный спутник Земли представлял собой подвижный НО и от него определялись дистанции Di (i=l,2) в два последовательные моменты времени).
Техническая реализация получения НП в дальномерной системе при беззапросном варианте ее построения, не предусматривающем излучения сигналов запроса потребителями навигационной информации основана на том, что необходимо с высокой точностью определять время прохождения импульсного сигнала от НО до ПИ, т. е. – необходимо знать момент излучения сигнала t0 навигационным ориентиром и момент приема сигнала t1 бортовым приемоиндикатором. Отсюда, время прохождения сигнала от НО к ПИ будет равно τ= t1- t0 и расстояние тогда определится уравнением D= τ ·Vp, где - Vp скорость распространения радиоволны. Таким образом, через последовательные интервалы времени t1, t2 можно определить D1 и D2. Однако, чтобы определить НП — дальность Di В рассматриваемом случае, необходимо не только зафиксировать момент t1 прихода сигнала в точку расположения бортового ПИ, но и знать момент t0 излучения сигнала НО, что предполагает, в частности, хранение в бортовом ПИ шкалы времени НО. Реализация такого технического способа сложная, так как нужна высочайшая синхронизация (привязка) шкалы времени бортового ПИ со шкалой времени НО.
Практически в бортовых ПИ шкала времени НО восстанавливается за счет использования высокостабильных опорных генераторов — стандартов частоты колебаний. Так, например, для обеспечения точности измерения дальности не хуже 10 метров допустимое относительное расхождение частот опорных генераторов ПИ и НО должно лежать в пределах 10 -14— 10 -15, что
представляет достаточно сложную техническую задачу с точки зрения ее реализации.
В настоящее время специальные импульсные дальномерные системы в морской навигации не применяются, а принцип дальномерной импульсной системы реализован в навигационной радиолокации, где в качестве береговых ретранслирующих станций используются радиолокационные маяки-ответчики.
Сейчас широко используется модификация дальномерного способа - псевдодальномерный метод [3,4].
При реализации псевдодальномерного метода допускается, что шкала бортового времени ПИ может быть сдвинута относительно шкалы единого времени используемых НО на неизвестную, но достаточно малую и постоянную за время определения НП величину
∆t.
Псевдодальномерный способ не накладывает жестких ограничений на долговременную стабильность бортового опорного генератора ПИ, но в то же время предполагает существование единой шкалы времени всех НО, образующих единую систему. В
этом случае значение НП — псевдодальность D связана, при отсутствии прочих погрешностей в измерениях, с истинной дальностью к НО соотношением:
D = D +Vp t .
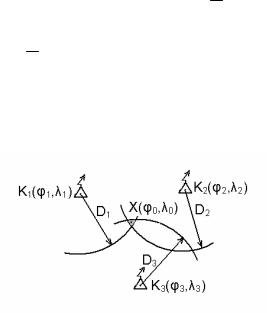
В связи с тем, что при этом способе появилась еще одна неизвестная величина (кроме φо и λо) - ∆t, требуется прием сигнала еще от одного, дополнительного, НО или же последовательно во времени принимать сигналы от одного и того же НО [1]. На рис.1.2 показан пример приема сигналов от трех навигационных ориентиров.
Рис.1.2. Пример приема сигналов от трех навигационных ориентиров
В современных ПИ задача определения места судна, в данном случае, сводится к автоматическому решению в вычислительном

устройстве приёмника системы из трех уравнений вида (1), где в левой части приняты значения cos Di , ( i =1,2,3 ).
В результате ее решения при использовании трех НО получают не только координаты φо и λо местоположения судна, но и оценивают систематическую погрешность определения дальности Vp∆t, вызванную погрешностью ∆t эталона времени бортового ПИ.
Псевдодальномерный способ реализован в разработанных СНС с использованием искусственных спутников Земли (ИСЗ) на средневысотных орбитах «Навстар» (США), «Глонасс» (Россия) и развертываемой европейским космическим агентством СНС
«Галилео» [9,10,11,14].
Разностно-дальномерный способ. В этом способе в качестве НП используется не временное определение, а используется разность расстояния ∆D образующаяся между двумя НО.
∆D – это равная разность расстояний между парой излучателей – передающих станций, так называемых ведущей и ведомой станциями.
В разностно-дальномерном способе, для определения места судна необходимо иметь две разности расстояния, т. е. достаточно измерить разности расстояний ∆Di (i=1,2) до двух пар излучателей сигналов РНС. В этом случае возможное минимальное количество НО в такой РНС – три (одна из станций будет общей – ведущей для двух ведомых станций).
Известно, что геометрическое место точек на земной поверхности, удовлетворяющее условию ∆D - const, образует сферическая гипербола, в фокусе которой находится излучатель сигналов РНС. При пресечении сферической гиперболы с земной поверхностью образуется изолиния, представляющая собой гиперболу. Поэтому разностно-дальномерные системы по виду создаваемых изолиний часто называют гиперболическими.
К разностно-дальномерным системам в настоящее время относятся РНС «Лоран-С» (США), «Чайка» (Россия), однако используемых в судовождении относительно редко.
Радиально-скоростной способ базируется на измерении скорости сближения (удаления) НО по отношению к потребителю навигационной информации, что позволяет находить в ПИ изменение частоты принятого сигнала от НО. Этим изменением является
доплеровский сдвиг частоты. Этот способ применялся в низкоорбитальных СНС доплеровского типа «Транзит» (США) и «Цикада» (Россия) [1,2].
Третий признак классификации - по виду используемого РНП: системы радионавигации делятся на четыре основных класса - угломерные, временные (импульсные), фазовые и частотные [1].
В угломерных РНС используются амплитудные методы измерения.
Временные РНС используют для выделения необходимой навигационной информации в бортовых ПИ измерения запаздывания принимаемого импульсного сигнала относительно моментов времени, определяемых в конечном итоге единой шкалой времени НО. Представитель данного класса РНС – ранее используемая в морской навигации система «Лоран-А» (США) [5,6,8].
В фазовых РНС осуществляют измерения в бортовом ПИ запаздывания фаз принятых сигналов от береговых станций. Фазовые РНС благодаря высокой точности фазовых измерений получили большое распространение на судах с высокоточным позиционированием, в гидрографии, геодезии. К данному типу относятся РНС «Декка» (Великобритания), «РСВТ-1», «Брас», «Марс75», «РСДН-20» (Россия). (РСВТ – радионавигационная система высокой точности; РСДН – радионавигационная система дальней навигации).
Для обеспечения навигации морских и воздушных транспортных судов используются также комбинированные — импульсно-фазовые РНС «Лоран-С» (США) и «РСДН-3» («Чайка») (Россия).
К частотным РНС относились доплеровские СНС «Транзит» (США) и «Цикада» (Россия).
По частотному диапазону радиоволн РНС классифицируются следующим образом:
сверхдлинноволновые - («РСДН-20», «Омега»); длинноволновые - («РСВТ-1»,«Марс-75»,«РСДН-3», «Декка»,
«Лоран-С»); средневолновые («Брас», «Лоран-А»),
ультракоротковолновые («Цикада», «Глонасс», «Транзит», «Навстар»).
По дальности действия РНС принято классифицировать в соответствии со следующей системой:
глобальные - спутниковые навигационные системы; системы дальней навигации, имеющие максимальную
дальность около 1500 миль («Лоран-C», «РСДН-3», «РСДН-20»); системы средней дальности действия - до 500 миль («РСВТ-
1», «Марс-75», «Декка»);