

Рис.2.7.Принцип фазовой модуляции
Нахождение псевдорасстояний (или их разности) осуществляется при импульсном излучении сигналов спутниками. Однако, для повышения помехозащищенности системы, в действующих СРНС используют псевдошумовую модуляцию излучаемых сигналов. Это дает возможность всем ИСЗ работать на
одной и той же несущей частоте (на волне около 19 см и/или 24.4
см), но со своим законом модуляции. Применение псевдошумовой модуляции с длительным периодом неповторяемости сигнала (до нескольких недель) создает условия для построения СРНС, определение места по которой невозможно, если пользователю не известен код модуляции [2].
Наряду с этим в системе может быть применен и более короткий по времени код модуляции, позволяющий определяться всем желающим пользователям, но с меньшей точностью.
2.3.Определение координат по сигналам СРНС типа «Навстар» («ГЛОНАСС»)
Для определения координат в СРНС необходимо иметь сведения о местоположении ИСЗ на каждый момент времени. Для этого на ИСЗ формируется эфемеридная информация, которая состоит из дальномерного кода и информационного сигнала. [4].
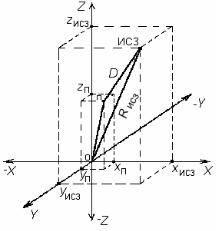
Рис.2.8.
Таким образом, выделяемый на борту потребителя информационный сигнал несет сведения о параметрах движения ИСЗ, а дальномерный радионавигационный сигнал—сведения о параметрах движения потребителя относительно ИСЗ.
Для составления навигационных уравнений используем систему декартовых координат (рис.2.8) с началом в центре Земли (геоцентрическую прямоугольную систему координат). Обозначив через хисз, уисз, zисз и хп, уп, zп соответственно координаты ИСЗ и потребителя, квадрат расстояния между ними представим как [4,22].
D2 = ( хисз - хп)2 +( уисз - уп)2 +( zисз - zп)2 |
(10) |
Если бы шкалы времени ИСЗ и потребителя были точно совмещены, то для нахождения координат достаточно было бы измерить три РНП (D1, D2, D3 — расстояния до трех ИСЗ), составить систему из трех уравнений вида (10) и найти из нее три неизвестные: хп, уп, zп. При наличии расхождения шкал времени ∆t = const измеренная псевдодальность включает величину с∆t, поэтому система уравнений принимает вид
или |
(Di + с∆t)2 = ( хисзi - хп)2 +( уисзi - уп)2 +( zисзi - zп)2, |
(11) |
______________________________________ |
|
Di = √( хисзi - хп)2 +( уисзi - уп)2 +( zисзi - zп)2 –(2Di с∆ t+ с∆t2) , (12)
где индекс i соответствует номеру ИСЗ.
Для расчета хп, уп, zп и ∆t требуется измерить четыре РНП (Di + с∆t, i=l, 2, 3, 4) и решить систему из четырех уравнений (12).
Система уравнений (11) может быть использована для определения координат, как при дальномерных, так и при псевдодальномерных измерениях. В первом случае ∆t = 0 и для решения задачи можно ограничиться лишь тремя уравнениями (i=1,2,3). При псевдодальномерных измерениях шкалы времени потребителя и ИСЗ не совмещены, но ∆t неизменно в процессе навигационного сеанса. Поэтому для решения задачи необходимо провести дополнительное, четвертое, измерение (D4 + с∆t), дополнив, таким образом, число уравнений до четырех.
При псевдодальномерных измерениях имеется возможность оценки составляющих вектора скорости потребителя по результатам измерений разности частот принятого сигнала и бортового опорного генератора, т.е. по измерениям доплеровских сдвигов несущих частот сигналов НКА, вызываемых движением определяющегося объекта и НКА.
Для этого вновь обратимся к системе уравнений (11). Переход от измерения дальностей (псевдодальностей) к измерению скоростей (псевдоскоростей) позволяет с помощью дифференцирования по времени уравнений (11) вычислить значения составляющих вектора скорости потребителя.
После дифференцирования (11) получим
(Di + с∆t) (Di' +δD' ) = ( хисзi - хп) ( х'исзi – х'п) +( уисзi - уп) ( у'исзi -у'п)+
+( zисзi - zп) ( z'исзi - z'п)
или
Di' +δD' =(Di + с∆t)-1[( хисзi - хп) ( х'исзi – х'п) +( уисзi - уп) ( у'исзi - у'п) +
+( zисзi - zп) ( z'исзi - z'п)] , |
(13) |
где δD' — поправка радиальной скорости за счет расхождения частот опорных генераторов потребителя и ИСЗ; i=1,2,3,4.
Имея в виду, что хп, уп, zn и ∆t определены на первом этапе решения навигационной задачи (при решении системы уравнений (11)), х'исзi , у'исзi , z'исзi транслированы на борт потребителя информационным сообщением, а сумма Di' +δD' измерена на борту потребителя с помощью сравнения частот принятых сигналов с частотой опорного генератора, получаем систему из четырех уравнений с неизвестными x'п, у'п, z'п и δD'. Решение этой системы