

Ч а с т ь 1
Судовые НРЛС и САРП
1. Навигационные радиолокационные станции
Радиолокацией называется обнаружение с помощью электромагнитных колебаний различных объектов (целей), определение координат и параметров их движения.
Слово «локация» происходит от латинского слова «location» и обозначает «размещение», «расположение». Комплекс радиотехнических средств, выполняющий указанные выше задачи, называется радиолокационной станцией (РЛС), а для обеспечения безопасности мореплавания (в навигационных целях), иногда морские РЛС обозначают как навигационные РЛС – НРЛС. (Часто употребляется общее название «радиолокатор». В американской и английской литературе – radar – от слов radio detection and ranging –
радиообнаружение и определение расстояния).
Радиолокационным объектом может быть любое физическое тело или группа тел, электрические и магнитные свойства которых (диэлектрическая и магнитная проницаемость, проводимость) отличаются от свойств среды, в которой распространяются радиоволны, излучаемые РЛС.
Радиолокационные объекты могут быть точечными и протяженными. Радиолокационное изображение на экране индикатора РЛС точечных целей (объектов) имеет одинаковые размеры и форму. А протяженного объекта – радиолокационное изображение практически повторяет в соответствующем масштабе форму и размеры этих объектов.
К точечным объектам относятся малоразмерные надводные цели, например – буй, веха с радиолокационным отражателем (или без него). Точечным объектом может быть и крупнотоннажное судно, если оно находится на большом расстоянии от РЛС.
Полезная информация о цели получается за счет поступившей
вприемник РЛС радиоволны, отразившейся от цели.
Взависимости от того, каким образом поступает в приемник РЛС радиоволна от цели, существует пассивная и активная радиолокация.
РЛС пассивного действия состоит из (см. рис.1.1)
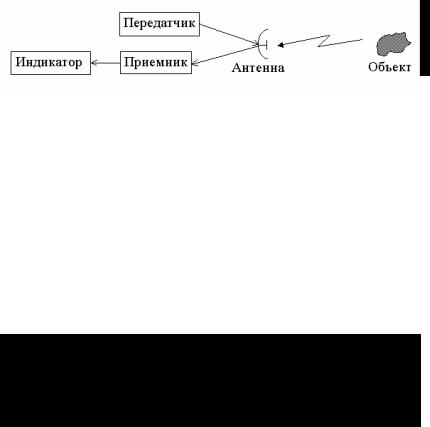
Рис.1.1. Упрощенная схема РЛС пассивного действия
высокочувствительной остронаправленной приемной антенны, приемника и индикатора.
Такого типа РЛС используется для приема сигналов, создаваемых тепловым радиоизлучением. Поэтому пассивная радиолокация называется еще и радиотеплолокацией (например, прием электромагнитных волн от звезд, Солнца, Луны и других тел. На этом принципе работают так называемые радиосекстаны).
Активная радиолокация может быть с пассивным ответом (первичная радиолокация) или с активным ответом (вторичная радиолокация).
РЛС активного действия с пассивным ответом содержит (см. рис.1.2) передатчик, который с помощью антенны излучает в пространство радиоволны. Если на пути этой радиоволны окажется объект, то радиоволна отразится, и часть ее попадает в антенну РЛС, откуда она поступает в приемник и с него – в индикатор.
Рис.1.2. Упрощенная схема РЛС активного действия с пассивным ответом
Активная РЛС с активным ответом отличается от активной РЛС с пассивным ответом наличием на объекте или на заранее обусловленном пункте радиолокационного передатчика (ответчика), который отвечает на сигналы «запрашивающей» РЛС.
В зависимости от структуры излучаемых (зондирующих) радиолокационных сигналов различают РЛС непрерывного излучения колебаний и импульсные. (На судах гражданского флота, в подавляющем большинстве, применяются импульсные НРЛС).
1.1. Импульсная НРЛС. Принцип ее построения
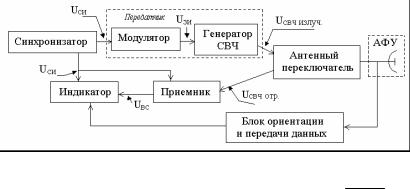
Импульсная НРЛС (см.рис.1.3) периодически излучает через антенный переключатель с помощью антенны кратковременные радиоимпульсы (как правило, сверхвысокочастотные – СВЧ колебания), а в промежутке между излучениями этих импульсов отраженные СВЧ колебания попадают на туже антенну, затем через антенный переключатель – в приемник. Усиленные и обработанные специальным образом отраженные импульсы воспроизводятся на индикаторе.
Рис.1.3. Упрощенная структурная схема импульсной НРЛС
Расстояние до цели D определяется уравнением D= Vp tD ,
2
где: Vp - скорость распространения электромагнитной волны (СВЧ колебаний) в свободном пространстве,
tD - время распространения кратковременных радиоимпульсов от антенны до цели и обратно от нее к антенне. (При расчетах Vp
принимают равной скорости |
света |
c = 3 108 м/с, |
то есть |
|
приведенная выше формула обычно записывается как |
|
|||
D= |
c tD |
, |
|
(1) |
|
|
|||
2 |
|
|
|
|
а направление на цель определяется угловым положением антенны (ее диаграммы направленности) относительно выбранного направления или плоскости.
Основные временные соотношения при работе импульсной НРЛС приведены на рис.1.4.
Синхронизатор вырабатывает последовательность кратковременных видеоимпульсов (так называемых
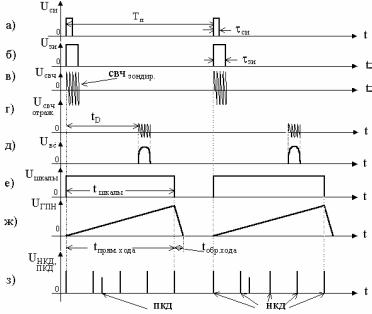
синхронизирующих импульсов Uси – см. рисунки 1.3, 1.4) для управления работой передатчика, приемника и индикатора НРЛС. Синхроимпульсы синхронизируют (согласовывают во времени) совместную работу указанных выше устройств НРЛС.
Передатчик НРЛС состоит из двух основных блоков – модулятора и генератора СВЧ колебаний, в качестве которого используется магнетрон.
Модулятор, под воздействием синхроимпульсов (рис.1.4, эпюра «а»), в зависимости от шкал дальности, формирует мощные запускающие импульсы (эпюра «б») определенной длительности (в современных НРЛС τзи =0,07…1,0 мкс), под воздействием которых генератор СВЧ колебаний генерирует мощные короткие радиоимпульсы (эпюра «в»).
Рис.1.4. Основные временные соотношения работы импульсной НРЛС
Антенный переключатель (АП) обеспечивает коммутацию одной антенны поочередно к передатчику и приемнику; защищает (блокирует) входные цепи приемника от мощных зондирующих СВЧ импульсов собственного передатчика (а также соседних НРЛС); закрывает выходные цепи передатчика при приеме отраженных сигналов от целей.