


В любой гиперболической системе пара станций позволяет определить только одну изолинию.
А для определения места подвижного объекта (см. рис.1.1) необходимо определить минимум еще одну изолинию. Поэтому, для получения второй изолинии необходимо использовать сигналы еще одной пары станций. В этом случае РНС должна состоять минимум из трех станций – одна из которых будет ведущей, а две остальные – ведомыми. На рис.1.7 показан пример отображения изолиний
Рис1.7. Пример отображения изолиний двух пар цепочек РНС
разностно-дальномерной РНС такого варианта - с ведущей станцией
Аи двумя ведомыми – В и С.
1.5.Некоторые ошибки в определении навигационного параметра
1.5.1.Ошибки, вызванные скоростью распространения радиоволны
Из приведенных выше уравнений (5,6) видно, что важное значение имеет знание реальной скорости распространение радиоволны. Обычно принято считать, что скорость распространения
радиоволны приблизительно равна скорости света, т. е. vp ≈ C .
В свободном пространстве, характеризующееся магнитной и диэлектрической проницаемостью (соответственноμ0 и ε0 ) [1,24],

C = |
1 |
= 299792 км |
с |
. |
|
||||
|
μ0 ε0 |
|
||
|
|
|
||
При распространении радиоволн в атмосфере их скорость отличается от С и зависит от коэффициента преломления n в
атмосфере. Тогда vp = C n . Для нормальных параметров атмосферы
(стандартная атмосфера - давление Р=760 мм, tº=15ºС, упругость паров е=8,8 мм при относительной влажности s =70% ) n =1,000326 [3,24], что приводит к уменьшению скорости распространения
радиоволны в атмосфере до vp = 299695 кмс .
Действительная же скорость распространения радиоволн меняется в широких пределах в зависимости от электрических характеристик среды, в которой происходит распространения радиоволн. Например, на основании большого числа экспериментальных измерений установлено, что при распространении радиоволн над морем средняя скорость составляет 299650 км/с, а над сушей, имеющей меньшую удельную проводимость,- около 299700 км/с [6].
1.5.2. Ошибки, вызванные свойством атмосферой
При анализе условий распространения радиоволны используется деление их на поверхностные волны, распространяющиеся вдоль земной поверхности по кратчайшему расстоянию и пространственные, отраженные от ионосферы.
Для навигационных измерений может использоваться (см. рис.1.8) только поверхностная радиоволна или волна, отраженная от ионосферного слоя Е.
Скорость распространения поверхностных радиоволн (обозначаются символом G – от Ground – земля) зависит не только от состояния атмосферы, но и от характера подстилающей поверхности Земли
Рис.1.8. Распространение поверхностных и пространственных радиоволн

(в данном случае – водной поверхности) на трассе их
распространения. |
|
Наличие подстилающей поверхности |
обусловливает |
отставание фазового фронта радиоволн по сравнению с распространением в свободном пространстве, что эквивалентно
замедлению фазовой скорости vф колебаний с увеличением
расстояния от излучателя к приемнику и, как следствие этого, - увеличение полного запаздывания τ колебаний, распространяющихся вдоль подстилающей поверхности [1],
τ = D vp + τдоп .
Все это приводит к необходимости использования для каждого района, где находится РНС, своего значения vф .
На практике для расчета сеток изолиний РНП используют некоторое среднее значение фазовой скорости vф.ср. .
Отклонение действительного значения vф от его среднего
(расчетного) значения приводит к возникновению систематических погрешностей, исключаемых специальными поправками, которые помещены в соответствующих Руководствах по использованию РНС.
В настоящее время в современных приемоиндикаторах автоматически рассчитываются поправки, учитывающие влияние подстилающей поверхности, используя данные проводимости подстилающей поверхности, которые хранятся в памяти аппаратуры.
Пространственные волны.
Под влиянием солнечной радиации в верхних слоях атмосферы образуется ионизированная область — ионосфера, представляющая собой разреженную слабоионизированную плазму, в которой непрерывно протекают процессы ионизации и рекомбинации атомов. В ионосфере принято выделять несколько слоев (D, Е, F1, F2), которым соответствуют локальные максимумы электронной концентрации плазмы. Высота слоев ионосферы лежит ,в зависимости от солнечной активности, в следующих пределах: D –
60 - 80 км, E- 90-130 км, F1 - 180 -240 км, F2 -230 - 400 км [2,5,6,17].
Так как основной источник ионизации - излучение Солнца, то структура ионосферы значительно меняется в зависимости от уровня освещенности, времени суток, сезона. Так, в ночных условиях слои D
и F1 исчезают, а электронная концентрация слоев Е и F2 существенно уменьшается, что эквивалентно увеличению их эффективной (отражающей) высоты.
При попадании радиоволн в ионосферу электромагнитная энергия частично рассеивается (поглощается) в ней, и при определенных условиях может наблюдаться процесс отражения радиоволн. Характер и степень отражения зависят oт электронной концентрации отражающего слоя ионосферы, частоты радиоволны f и угла падения радиоволны на нижнюю границу ионосферы.
Пространственные (ионосферные) сигналы S (от Sky – небо, см. рис.1.8) в точке приема будут запаздывать относительно момента прихода поверхностных сигналов, так как проходят большую трассу распространения.
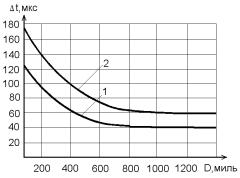
Зависимость времени запаздывания, от времени судок и дистанции судна от передающей станции, приведена на рис.1.9.
Рис.1.9. Задержка пространственной радиоволны относительно поверхностной для частоты 100 кГц (1-день; 2-ночь)
Степень их затухания из-за отсутствия потерь в подстилающей поверхности меньше, чем поверхностных, и поэтому они распространяются на большие дистанции.
Напряженность поля пространственных сигналов определяется электрическими параметрами отражающего слоя ионосферы и зависит от частоты радиоволн. Поэтому влияние пространственных сигналов в радионавигации оценивается применительно к конкретной РНС.