

5. Антенно-волноводные устройства судовых НРЛС
Антенно-волноводные устройства (АВУ) судовых НРЛС предназначены для излучения мощных СВЧ колебаний, формируемых в передатчике, приема отраженных от целей СВЧ колебаний малой мощности и передачи этих колебаний в тракт приемника.
Обычно АВУ состоит из антенны и волноводного тракта. Основные требования к антеннам:
-возможность кругового, равномерного обзора;
-высокая направленность действия и обеспечение необходимых параметров диаграммы направленности (ДН);
-минимальная интенсивность боковых лепестков;
-широкая полоса пропускания частот, удовлетворяющая излучаемым импульсам длительностью от 0,07мкс до 1,0мкс;
-достаточная механическая прочность и жесткость в сочетании
с минимальной массой, размерами и парусностью.
Одним из важных параметров антенны, влияющий на эксплуатационные параметры НРЛС, является диаграмма направленности антенны.
Диаграмма направленности антенны показывает зависимость плотности потока мощности (П) или амплитуды напряженности поля антенны (Е) от направления в пространстве при постоянном расстоянии до точек наблюдения.
Для сравнения направленных свойств антенны, характеристики направленности приравнивают к единице, то есть относят их к максимальным значениям напряженности поля или плотности потока мощности в направлении максимального излучения и записываются в виде:
E(α,θ) = Emax F(α,θ) или
П(α,θ) = Пmax F(α,θ),
где Emax и Fmax - максимальные значения соответствующих величин.
Наряду с формульной зависимостью ДН существует и более наглядный способ ее изображения – графический метод. Часто, в главных плоскостях (вертикальной и горизонтальной), нормированные ДН изображают в полярной (рис.5.1,а) или прямоугольной системе координат (рис.5.1,б).
Угол θ0,5 ,(а также угол α0,5 - в горизонтальной плоскости) на уровне половинной мощности характеризует соответственно ширину

диаграммы направленности в вертикальной и горизонтальной плоскости.
Полярные диаграммы направленности более наглядны. На них хорошо отображаются боковые и задние лепестки.
Рис.5.1. а) ДН в полярной и - б ) в прямоугольной системе координат
Направление максимального излучения при α = 0o и θ = 0o .
Линия пересечения диаграмм в вертикальной и горизонтальной плоскостях называется осью диаграммы направленности.
На рис.5.2 приведена расчетная диаграмма направленности для антенны с размерами: в вертикальной плоскости – 15 см, размахом –
300см, при длине волны 3,2см, α =1,4о , θ = 22о [21].
Рис.5.2.
В судовых НРЛС наибольшее распространение получили рупорно-щелевые и линзовые антенны.
В более ранних моделях НРЛС использовались так называемые
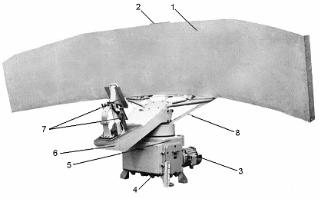
рупорно-параболические антенны (первые модели НРЛС “Донец”, “Океан”). На рис.5.3 показано фото использовавшейся ранее двухдиапазонной рупорно-параболической антенны НРЛС “Океан-01”, в фокусе которой установлены два рупора – 3-х и 10-ти сантиметрового диапазонов [7].
В таких антеннах в качестве отражателя используется конструкция, представляющая собой усеченную параболу, в фокусе которой размещен выход волновода, заканчивающегося рупором.
Рис.5.3. Пример конструкции рупорно-параболической антенны
На этом рисунке показано: 1- отражатель; 2- площадка установки кронштейна «трубки холодного прицела»; 3- двигатель вращения антенны; 4- волноводный фланец и сальник кабеля; 5- корпус привода; 6- кронштейн излучателей; 7- излучатели; 8- кронштейн отражателя
Рупор на выходе волновода устанавливается из следующих соображений: если осуществлять излучение (то есть облучать параболическое зеркало) открытым концом волновода, эффективность излучения в этом случае будет небольшой, так как существует несогласованность волнового сопротивления волновода и свободного пространства. В этом случае часть энергии будет отражаться обратно в волновод [6]. Поэтому, чтобы не было переотражений, то есть, чтобы было согласование волнового сопротивления волновода и свободного пространства, на выходе волновода устанавливается рупор.
Раскрыв рупора, как правило, герметизирован пенопластиковой крышкой, посаженной на эпоксидную смолу или другой радиопрозрачный клей.
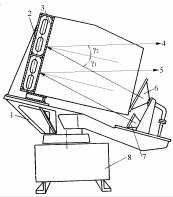
Из рис.5.4 (антенна НРЛС “Океан-01”) видно, что угол “падения”
γ1 излучаемых СВЧ колебаний равен углу “отражения” γ2 этих колебаний.
Чтобы устранить воздействие зеркала параболоида на рупорный
облучатель, применяют облучение рефлектора под углом γ1 относительно нормали к плоскости параболоида (рис.5.4).
Рис.5.4. Конструкция двухдиапазонной рупорнопараболической антенны НРЛС «Океан-01»
На рис. 5.4 показаны:
1- кронштейн; 2- сечение зеркала отражателя антенны; 3- отражающая поверхность; 4- направление излучения 10-см диапазона; 5- направление излучения 3-см диапазона; 6- излучатель 10-см диапазона; 7- излучатель 3-см диапазона; 8- корпус привода антенны.
Для этой цели рефлектор наклоняется относительно вертикальной плоскости на угол γ1, а облучатель (рупор)
располагается на фокальной линии под углом γ1+γ2 относительно горизонтальной плоскости. Тогда облучатель не будет находиться на пути распространения энергии, отраженной от зеркала параболоида.
Величина угла наклона γ1 выбирается в пределах 10°…15°. Параболические рефлекторы делаются иногда не сплошными, а
решетчатыми («продувными»), это уменьшает массу и парусность антенны. Чтобы избежать просачивания энергии сквозь отверстия
зеркала, размер отверстий практически берется равным около 0,1λ.