


Частным случаем радиально-скоростного метода является траверзный метод определения, рассмотренный ранее. Очевидно, что определение места по траверзному методу производится с меньшей точностью, чем определение по нескольким пересекающимся изодопам.
Абсолютная точность радиально-скоростного доплеровского метода определения места тем лучше, чем выше частота колебаний, излучаемых спутником, и чем больше его скорость. Поэтому применяют круговые орбиты высотой не более 1000 км и частотой излучения, равной нескольким сотням мегагерц.
Максимальное значение доплеровской частоты при этом достигает нескольких килогерц, что обеспечивает простоту измерений.
2.2.4.Разностно-дальномерный (интегральный) метод
При своем движении ИСЗ занимает на орбите последовательные точки S1, S2, S3... (рис. 2.4).
Рис.2.4. Интегральный доплеровский метод
Это приводит к образованию в пространстве гиперболической РНС, база которой перемещается по орбите ИСЗ. Измерение разности расстояний ∆D1 от судна до двух последовательных точек нахождения спутника S1, S2 дает поверхность положения в виде первого гиперболоида вращения.
Измерение ∆D2 от точек S2, S3 дает второй гиперболоид вращения. Пересечение гиперболоидов вращения с поверхностью
Земли создает на ней гиперболические линии положения, пересекающиеся друг с другом.
Определение разности расстояний осуществляется доплеровским методом путем интегрирования (подсчета суммарного количества периодов колебаний (импульсов биений)) частоты Доплера за время перемещения ИСЗ на длину базы [2].
Таким образом, каждому количеству импульсов биений доплеровской частоты соответствует свое значение разности расстояний от точек нахождения ИСЗ в моменты начала и конца подсчета импульсов биений. Технических трудностей такой метод измерений не представляет, так как отрезок времени (интервал интегрирования), в течение которого ведется подсчет, может быть достаточно большим. В СРНС «Транзит», где использовался этот метод, интервал интегрирования составлял от 120c до 24с. Двухминутный интервал подсчета суммарного количества периодов колебаний соответствует гиперболической РНС с базовым расстоянием 870 км. Точность определения места при подсчете импульсов биений с погрешностью до одного импульса может быть не хуже нескольких метров.
За время нахождения ИСЗ в зоне его видимости может быть получено достаточно большое количество пересекающихся линий положения. Обработка результатов измерения на ЭВМ, входящей в комплект судового приемоиндикатора, дает возможность получения места судна с высокой точностью. Вычисление производится по программе, в которой сравниваются измеренные значения со счислимыми путем последовательных приближений несколькими циклами (итерациями) до полной сходимости результатов. Координаты судна (долгота и широта) и время определения отображаются на дисплее приемоиндикатора.
2.2.5. Дальномерный метод
Определение дальности по ИСЗ возможно либо активным (запросным), либо пассивным (беззапросным) способом.
При активном способе судовой передатчик излучает запросный сигнал, который спутник принимает и переизлучает обратно на судно. С выхода судового приемника принятый сигнал поступает в индикаторное устройство, где измеряется отрезок времени от момента посылки сигнала судном до момента его возвращения.
При пассивном способе излучение осуществляет только спутник, сигналы которого согласованы с единым временем
благодаря высокостабильному собственному генератору, периодически синхронизируемому от наземной станции. Принятый на судне сигнал позволяет определить дальность до ИСЗ при наличии в судовом приемоиндикаторе своего стабильного эталонного генератора.
При любом из этих двух способов спутник должен передавать свои траекторные данные на момент установления связи между ним и судном.
Активный способ для определения места судна в настоящее время в спутниковых РНС не применяется, но не исключено его применение в некоторых других системах.
Пассивный способ до середины 70-х годов не мог обеспечить достаточной точности из-за отсутствия компактных и недорогих генераторов эталонной частоты (времени) с необходимой стабильностью. Появление эталонов частоты на атомной основе (рубидиевых, цезиевых и водородных) дало возможность использовать дальномерный пассивный (так называемый псевдодальномерный) метод в СРНС с круговыми орбитами высотой около 20 тыс. км («Навстар», «Глонасс»).
Нахождение в зоне видимости одновременно не менее трехчетырех ИСЗ создает условия для определения трех координат (широты - φ, долготы - λ, высоты - Н) при наличии у пользователя обычного кварцевого эталонного генератора со значительно меньшей стабильностью по сравнению с установленными на ИСЗ.
Для использования этого метода на орбиты выводится достаточно большое количество спутников таким образом, чтобы четыре из наблюдаемых ИСЗ находились в положениях, которые обеспечивают наилучшую геометрию для определения.
2.2.6. Пассивный псевдодальномерный способ определения места
Измерение псевдодальности от космического аппарата (КА) до аппаратуры потребителя (АП) происходит в пассивном режиме, поскольку радиосигнал распространяется от спутника к приемоиндикатору (ПИ) в одном направлении [12].
Если бы был известен момент излучения сигнала со спутника, то расстояние от него к ПИ можно определить согласно формуле:
D = ct, |
(8) |
где t - время движения радиосигнала от КА к ПИ.
Радиоволна распространяется со скоростью приблизительно равной скорости света в вакууме с = 3·108 м/с.
Если КА относительно ПИ будет в зените, например на высоте 20180 км, то радиосигналу потребуется время t ≈ 0,06 с, чтобы пройти это расстояние. Поэтому необходимо определять время с высокой точностью, для чего устанавливаются "высокоточные часы" на КА и ПИ.
В современных СРНС «Навстар», «Глонасс» применен совершенный способ измерения времени, основанный на атомном стандарте частоты, который обеспечивает ход бортовых часов КА с точностью 10-9с. Главной трудностью при измерении времени прохождения радиосигнала явилось точное выделение в ПИ момента времени, в который радиоимпульс излучен с КА.
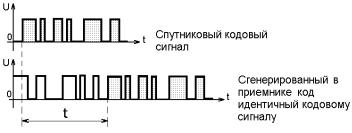
Для этого разработчики СРНС обратились к разумной идее: синхронизировать часы КА и ПИ так, чтобы они генерировали абсолютно идентичные последовательности сигналов - коды (см.
рис.2.5).
От КА приемоиндикатор принимается радиосигнал - код "излученный" и проверяется, как давно ПИ генерировал такой же код "опорный" – копию кода КА.
Рис.2.5. Принцип генерирования копии одинакового вида кода КА в ПИ
Выделенный таким образом сдвиг одинакового вида кода в сигнале КА и сгенерированного в ПИ будет соответствовать времени t прохождения радиосигналом расстояния от КА к приемоиндикатору.
Формирование таким образом "опорных" и "излучаемых" сигналов достигаются наличием в ПИ и КА высокостабильных генераторов - "часов".
Время распространения сигнала от передатчика КА к ПИ представляет собой задержку ∆t, на которую необходимо сдвинуть "опорный" сигнал, выработанный в ПИ, чтобы он с точностью до
фазы совпал с принятым (излученным с КА), при этом время задержки будет точно соответствовать времени распространения сигнала от излучателя к приемнику (см. рис.2.5). Данный "код" выглядит как ряд случайных импульсов - «псевдослучайных последовательностей». (Этим импульсным кодом модулируют несущую частоту сигнала, излучаемого спутником). Таким образом, на КА и в ПИ вырабатываются две абсолютно идентичные последовательности сигналов - коды, которые поступают в ПИ на смеситель, где и определяется временной сдвиг - т.е. время движения сигнала t от КА к ПИ.
Математически эти коды формируются из двух функций полиномовтипа[4,9]:
δ1 (x) =1 + x3 + x10 +...( x = t),
δ2 (x) =1 + x2 + x3 + x6 + x8 + x10 +...( x = t + δt).
Если их сложить в двоичном коде, сдвигая одну функцию относительно другой, получают 1025 различных вариантов. Из них выбирают 37, которые позволяют выделить совершенно некоррелированные сигналы. Полученная последовательность дает возможность распознавать номер КА и определить время прохождения радиосигнала от КА к приемоиндикатору, т.е. измерить навигационный параметр D.
Dпсд – псевдодальность (квазидальность - как бы дальность):
или |
Dпсд = c(t +δt); |
(9) |
|
Dпсд = D +с δt, |
|||
|
|
где D - истинное расстояние (см. уравнение 8); δt - погрешность в определении t.
Таким образом, ПИ измеряет время, за которое радиосигнал прошел от КА к приемоиндикатору. Если бы ПИ имел сверхточные часы (как на КА), точно синхронизированные с часами КА, то трех измерений Dпсд от трех КА было бы достаточно для определения места судна в трехмерной системе координат (хс, ус, zc) . Но точность часов ПИ значительно ниже - они (ПИ) стоили бы очень дорого. Тогда для определения места судна и погрешности времени δt используют измерения до четырех КА.
Большую часть δt составляет погрешность из-за рассогласование шкалы времени ПИ относительно шкалы времени КА (за счет значительной неточности шкалы времени в ПИ).
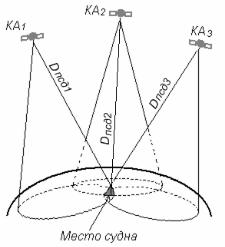
При измерении Dпсд до трех КА на поверхности Земли место судна (широта - φ и долгота – λ) находится в пересечении трех изолиний - окружностей, внутри треугольника погрешностей (см.
рис.2.6).
Для определения же еще и высоты антенны ПИ относительно поверхности Земли – необходимы измерения Dпсд до четырех КА.
Вычислительное устройство ПИ будет "прибавлять" или
"вычитать" Dпсд из измеренных при t1 , t2, t3 и t4 до тех пор, пока рассчитанные псевдодальности Dпсд не образуют пересечение
четырех сфер (изоповерхностей) в одной точке.
Рис.2.6.
В этом случае определяется место судна, погрешность шкалы времени ПИ относительно шкалы времени всей системы GPS и каждого КА. Для этого в ПИ имеется 4 канала приема и первичной обработки радиосигнала от КА (в некоторых ПИ 6-8 каналов).
Излучаемые КА кодированные радиосигналы модулированы по фазе. Принцип фазовой модуляции показан на рис.2.7.