

В данной схеме блок дросселей формирует лишь начальный участок этой кривой, обеспечивая этим самым необходимую линейность развертки. Для того чтобы к началу очередного прямого хода развертки ток предыдущего хода развертки уменьшился до нуля, применяются разрядные цепи.
Во время разряда (обратный ход развертки) луч электроннолучевой трубки не должен оставлять следа на экране. Для этого ЭЛТ запирается на время обратного хода и открывается на время прямого хода развертки.
7.1.2.Цифровая развертка НРЛС
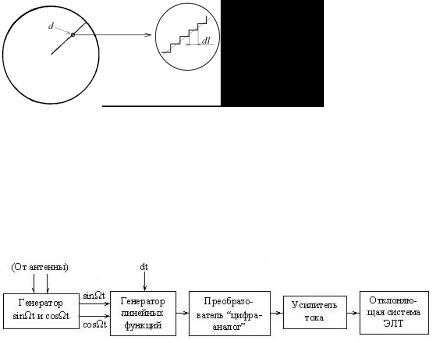
Вцифровой развертке непрерывное радиально-круговое перемещение луча на ЭЛТ заменяется линейно-ступенчатым перемещением луча в виде ступенчатой функции. Размер дискретного
перемещения луча dl должен быть в 2-3 раза меньше диаметра d сфокусированного луча на экране ЭЛТ (см. рис.7.9) [1,12].
Рис.7.9
В этом случае реальная развертка воспринимается глазом как непрерывная.
Ступенчатая функция формируется путем приращения двух цифровых пилообразных функций с крутизной нарастания пропорциональной синусу и косинусу угла поворота радиально-круговой развертки.
Упрощенная функциональная схема генератора цифровой развертки приведена на рис.7.10.
Рис.7.10.

Из рисунка видно, что схема состоит из цифрового генератора синуса и косинуса угла поворота антенны, генератора линейных
функций, на который поступают также и кванты дистанции dt , преобразователя “цифра-аналог”, усилителя тока и отклоняющей системы, состоящей из двух неподвижных, закрепленных на горловине ЭЛТ катушек, создающих взаимно-перпендикулярное магнитное поле.
Генератор линейных функций формирует коды линейных функций с крутизной, пропорциональной sin Ωt и cos Ωt , а также масштабу
изображения Im / l ,
где: Im - максимальный ток отклонения луча ЭЛТ,
l - длина развертки.
Преобразователь “цифра-аналог” функционирует согласно уравнений:
ix = |
∫ |
Im |
sin Ωtdt = − |
Im |
cos Ωt , |
|
l |
lΩ |
|||||
|
|
|
II
iy = ∫ lm cosΩtdt = lΩm sin Ωt .
После усиления полученных токов в усилителе тока, они создают в отклоняющей системе радиально-круговую развертку цифровым способом.
В индикаторах НРЛС, выпускаемых в последние годы, для отображения навигационной информации используют телевизионные кинескопы со строчной горизонтальной разверткой (рис.7.11) [17] или ЖК-дисплеи.
Рис.7.11.
Вцентральной части экрана кинескопа создается яркое, в том числе и цветное, радиолокационное изображение, а по краям экрана - дополнительная буквенно-цифровая информация различного характера.
Преобразование радиально-круговой развертки в телевизионную развертку осуществляется с помощью микропроцессоров и устройств памяти большой емкости.
Всовременных НРЛС применяются модули конвертера видеосигналов (Мк РЛС), которые преобразуют разнородную радиолокационную информацию в так называемый «композитный радиолокационный видеосигнал» [40].
Обычно в «композитном радиолокационном видеосигнале» объединены:
-положительный импульс синхронизации, соответствующий зондирующему импульсу РЛС и началу строба видеосигнала;
-видеосигнал от РЛС (всегда положительный), в пределах строба по времени, соответствующего периоду следования зондирующих импульсов РЛС, уменьшенному на 80-100 микросекунд, предшествующих очередному зондированию РЛС;
-по окончанию строба видеосигнала, Мк РЛС формирует последовательность отрицательных импульсов, представляющих собой последовательные коды параметров текущего положения антенны РЛС, установленных режимов работы, шкал дистанции, номера канала «композитного радиолокационного видеосигнала» для автоматической идентификации выбранной РЛС и бит признака о включении РЛС.