

Дополнение 2
Ситуации сближения
Для каждой из следующих ситуаций предвычисления произведены для положения цели, которое определено после предварительного сопровождения в течение одной или трех минут.
Параметры |
|
Ситуации сближения |
|
|||
1 |
|
2 |
3 |
|
4 |
|
|
|
|
||||
Курснашегосудна, град |
000 |
|
000 |
000 |
|
000 |
Скоростьсвоегосудна, узлы |
|
|
||||
10 |
|
10 |
5 |
|
25 |
|
Дальностьдоцели, мили |
|
|
||||
8 |
|
1 |
8 |
|
8 |
|
Пеленгцели, град |
|
|
||||
000 |
|
000 |
045 |
|
045 |
|
Относительныйкурсцели, град |
|
|
||||
180 |
|
090 |
225 |
|
225 |
|
Относительнаяскоростьцели, |
|
|
||||
20 |
|
10 |
20 |
|
20 |
|
узлы |
|
|
||||
|
|
|
|
|
|
|
Дополнение 3
Погрешности датчиков информации
Значения погрешностей, указанных в пункте 3.8, основываются на следующих значениях погрешностей датчиков информации, характеристики которых соответствуют эксплуатационным требованиям к судовому навигационному оборудованию.
Примечание: σ — среднее квадратичное отклонение.
Радиолокационная станция.
а) За счет флюктуации центра отражения цели (мерцания) для судна длиной 200 м:
вдоль длины цели σ = 30 м (нормальное распределение);
вдоль ширины цели σ = 1 м (нормальное распределение). б) За счет бортовой и килевой качки.
Погрешность пеленга будет максимальной на каждом из четырех квадрантов вокруг своего судна для целей на курсовых углах 045о, 135о, 225о и 315о и будет равна нулю на курсовых углах 0о, 90о, 180о и
270о. Эта погрешность изменяется синусоидально с удвоенной частотой качки.
Для качки 10о среднее значение этой погрешности равно 0,22о с наложением максимальной синусоидальной погрешности с амплитудой 0,22о.
в) За счет формы главного лепестка - среднеквадратическая погрешность в определении пеленга при нормальном распределении равна 0,05о.
г) За счет формы зондирующего импульса - среднеквадратическая погрешность в определении дальности при нормальном распределении равна 20 м.
д) За счет люфта антенны - максимальная погрешность в определении пеленга при равномерном распределении равна ±0,05о. е) За счет квантования максимальная погрешность в определении пеленга равна ±0,1о и в определении дальности равна ± 0,01 мили (при равномерном распределении). Если устройство кодирования связано с сельсином, средняя квадратичная погрешность в определении пеленга при нормальном распределении равна 0,03о.
Гирокомпас
Погрешность калибровки 0,5о. Среднеквадратическая погрешность σ = 0,12о при нормальном распределении относительно погрешности калибровки.
Лаг
Погрешность калибровки 0,5 узла. Утроенная среднеквадратическая погрешность 3 σ = 0,2 узла при нормальном распределении относительно погрешности калибровки.

Дополнение 4
Символы САРП и их атрибуты
(Символы САРП утверждены документом ИМО IEC 60872-1)
Режимы |
Символ |
Статус |
Примечание |
Автоматический
захват цели
Рваный квадрат вокруг захваченной Начальная стадия цели в начальной стадии слежения перед установившимся слежением
Антенна совершила от 20 до 60 оборотов (вектор направления ненадежен)
Ручной
захват цели
Установившееся
слежение
СРА Тревога
(вспыхивает)
СРА Тревога подтверждается
Цель потеряна
(вспыхивает)
Начальная стадия
Установившееся
слежение
Целый круг с вектором указывает на установившийся режим слежения
Вспыхивающий треугольник указывает на то, что параметры цели меньше допустимых СРА или TСРА
Вспыхивание прекращается после того, как тревога СРА/ТСРА подтверждена
Потерянная цель индицируется вспыхивающим ромбом. Ромб сформирован двумя равными треугольниками
Вручную захваченная цель индицируется разорванным квадратом жирными линиями
Рваный жирный квадрат с вектором остается, когда антенна совершает от 20 до 60 оборотов (3 оборота для
HSC)
Жирный круг с вектором указывает на установившийся режим слежения

Охранная
зона
Цель выбрана для считывания данных
Рекомендации по цели
(вспыхивает)
(вспыхивает)
(вспыхивает)
01
 R
R
После 60 разверток изменения к
СРА Тревога
Цепь потеряна
Цель пересекает охранную зону
Выбрана цель 01
Рекомендации по цели
Вспыхивающий треугольник указывает на то, что у цели параметры меньше допустимых СРА или ТСРА
СРА/ТСРА Вспыхивание прекращается после
того, как подтверждена тревога
Потерянная цель индицируется вспыхивающим ромбом. Ромб сформирован двумя равными треугольниками
Символ цели меняется на вспыхивающий равносторонний треугольник, вершиной вниз, когда цель входит вохранную зону
Данные о цели (дистанция, направление, курс, скорость, СРА и ТСРА)
Используется для вычисления путевой скорости собственного судна относительно грунта
Приложение 4.
1. Электронно-лучевые трубки
Электронно-лучевая трубка (ЭЛТ) является электронным прибором, в котором при работе используется тонкий пучок электронов, называемый электронным лучом [4,9].
Различают два типа электронно-лучевых трубок: с электростатическим управлением лучом и с магнитным управлением лучом.
Трубка состоит из особой формы стеклянного баллона, имеющего цилиндрическую часть — горловину и конусную часть. В цилиндрической части находятся устройства, создающие электронный луч и управляющие его движением. Дно конусной части колбы покрывается изнутри люминофором, который образует флуоресцирующий экран. Стенки конусной части и горловина колбы изнутри металлизируются или покрываются тонким слоем аквадага, представляющего коллоидный раствор графита.
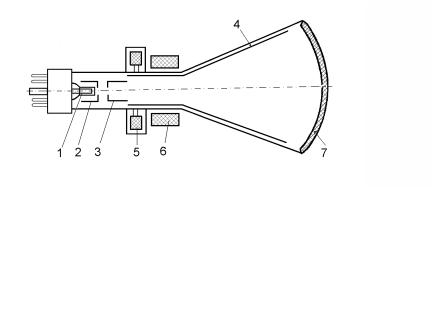
Устройство электронно-лучевой трубки с магнитным управлением, то есть с магнитным отклонением и магнитной фокусировкой электронного луча, показано на рис.1.
Рис. 1
Электронный прожектор, или электронная пушка, трубки с магнитным отклонением состоит из подогревного катода 1, управляющего электрода 2, первого анода 3, второго анода в виде графитового покрытия — аквадага 4 и фокусирующей катушки 5, которая надевается на горловину трубки снаружи. Через обмотку фокусирующей катушки пропускается постоянный ток, создающий сильное магнитное поле, воздействующее на электроны сквозь стекло
трубки. В результате электроны, точно летящие по оси трубки, проходят фокусирующее поле без отклонений, так как направление этих электронов параллельно силовым линиям магнитного поля. Остальная часть электронов, проходя через фокусирующее магнитное поле, подвергается закручиванию. В результате закручивания электроны прижимаются к оси трубки, образуя тонкий луч. Для регулировки фокусирующего магнитного поля изменяется величина тока, протекающего через фокусирующую катушку.
На управляющий электрод трубки, как и при электростатическом управлении, подается отрицательное напряжение. На первый анод подается положительное напряжение от 300 до 1500 В. Под действием этого напряжения электроны движутся от катода до выхода из первого анода, где они попадают под воздействие положительного поля второго анода, который придает электронам нужное ускорение.
Электроны попадают на люминофорный слой, после чего энергия электронов преобразуется в свет, то есть поток электронов заставляет точки люминофора светиться. Эти светящиеся точки люминофора формируют изображение, которое можно увидеть на мониторе.
Для этой цели на второй анод подается положительное напряжение величиной 5000…7000 В.
Отклонение электронного луча осуществляется с помощью специальной отклоняющей катушки 6, которая, как и фокусирующая катушка, помещается снаружи на горловине трубки. Для отклонения луча через катушку пропускается ток, создающий вокруг нее магнитное поле, взаимодействующее с электронным лучом таким же образом, как взаимодействует магнитное поле с проводником, по которому протекает ток. Направление отклонения луча зависит от направления тока через катушку. Отклоняющие катушки бывают вращающимися и неподвижными (в настоящее время в НРЛС применяются неподвижные отклоняющие катушки).
При увеличении тока через отклоняющую катушку магнитное поле вокруг ее витков будет увеличиваться, и электронный луч начнет отклоняться от центра экрана в радиальном направлении, зависящем от положения катушки (см. рис.2).
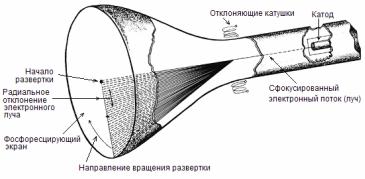
Рис.2
Одним из главных параметров, характеризующих ЭЛТ, является ее чувствительность.
Чувствительность электронно-лучевой трубки с магнитным управлением определяется по формуле k = γ/I·W , где γ — величина отклонения, I — ток через отклоняющую катушку, a W — число витков катушки. Чувствительность равна величине отклонения электронного луча на один ампер-виток.
Ввиду того, что число витков для данной катушки является величиной постоянной, то, следовательно, отклонение луча и чувствительность по отклонению пропорциональны току в отклоняющей катушке. Таким образом, для получения равномерной скорости отклонения луча ток через катушку должен изменяться линейно.
Экран 7 электронно-лучевой трубки (рис.1) предназначен для визуальной регистрации отклонения электронного луча и измерения его интенсивности. Основными характеристиками экрана являются характер свечения и время послесвечения. К характеру свечения относят яркость и цвет свечения. Яркость свечения экрана определяется величиной напряжения на ускоряющем аноде и материалом люминофора, а цвет свечения зависит от материала люминофора. Временем послесвечения называется продолжительность свечения экрана трубки после прекращения облучения его электронным потоком.
Время послесвечения условно делится на три группы: короткое, продолжительность которого не превышает 0,01 с, среднее
— продолжительностью от 0,01 до 0,1 с и длительное — более 0,1 с. Для возможности наблюдения быстро и непрерывно изменяющихся электрических процессов послесвечение экрана не