

С фазовым кодированием, фаза излучаемых сигналов (100 кГц сигналов) изменяется систематически от импульса к импульсу. Принятые приемником сигналы, отраженные от верхних слоев атмосферы, будут вне фазы с одновременно принятыми поверхностными сигналами и, поэтому, они не будут обработаны приемником.
Кроме своего основного назначения фазовое кодирование облегчает автоматическое опознавание сигналов и слежение за ними, позволяя выполнять эти операции даже в тех случаях, когда уровень сигнала ниже уровня помех.
Ведомые станции, входящие в одну цепочку, различаются между собой временем задержки излучений пакетов радиоимпульсов относительно момента излучения ведущей станцией. Поэтому пакеты радиоимпульсов каждой ведомой станции появляются после приема пакетов ведущей станции только в определенное время и отсчеты РНП (в микросекундах) для каждой пары станций одной цепочки ИФРНС будут лежать в своих пределах от минимального (на продолжении линии базы со стороны ведомых станций) до максимального (на продолжении линии базы со стороны ведущей станции).
Излучение сигналов пакетами из т радиоимпульсов увеличивает минимальный период повторения излучения Tпmin системы.
1.6.3.Влияние условий распространения радиоволн на работу ИФРНС«Лоран С»
Дальность действия системы составляет до 1200 миль при приеме поверхностных сигналов при точности определения РНП с использованием ПИ с реализацией фазовых методов измерений 0,1—0,3 мкс (соответствующая средняя квадратическая погрешность определения навигационного параметра 90 —150 м).
Пространственные (ионосферные) сигналы S (от Sky – небо, см. рис.1.8) в точке приема будут запаздывать относительно момента прихода поверхностных, так как они проходят большую трассу распространения. Зависимость времени запаздывания, от времени судок и дистанции судна от передающей станции, приведена на рис.1.9. Степень их затухания из-за отсутствия потерь в подстилающей поверхности меньше, чем поверхностных, и поэтому они распространяются на большие дистанции.

Возможный вид принимаемого сигнала при наличии поверхностного, однократно и двукратно отраженных сигналов, поступающих в приемоиндикатор, показан на рис.1.13 [21].
Рис.1.13. Общий вид принимаемого сигнала при наличии поверхностного и пространственных сигналов
Напряженность поля пространственных сигналов определяется электрическими параметрами отражающих слоев ионосферы и зависит от частоты радиоволн. Поэтому оценивать влияние пространственных сигналов в радионавигации целесообразно применительно к конкретной РНС.
Использование пространственных сигналов увеличивает дальность действия системы до двух раз, но - с одновременным ухудшением точности определения места до 1,5 — 3 миль.
Точность поддержания радионавигационного поля в рабочей зоне ИФРНС определяется стабильностью колебаний опорных генераторов береговых станций, которая определяется цезиевыми стандартами частоты. Излучение всех цепочек «Лоран-С» синхронизируется Всемирным координированным временем (UTC).
В состав каждой цепочки входят 1-2 контрольных пункта (КП), на которых периодически проверяется точность временных сдвигов при излучении сигналов, и вырабатываются управляющие сигналы на сведение (корректировку) временных шкал береговых станций. При нарушении синхронизации свыше установленных пределов (0,1 мкс) или нарушении формы излучаемых импульсов, аварийная станция по команде КП автоматически начинает передавать специальные
предупредительные сигналы потребителям. Это – либо амплитудная манипуляция двумя первыми импульсами в пакете аварийной ведомой станции (мигание длительностью 0,4 с с периодом повторения 3,6 с - в таком случае работать с этой станцией оператору нельзя), либо манипуляция 9-м импульсом пакета ведущей станции в соответствии с кодом Морзе, определяющим аварийную станцию. Цикл манипуляции составляет 12 с [1,4,15].
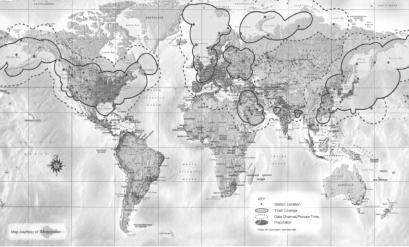
В настоящее время ИФРНС LORAN-C продолжает обеспечивать навигацию гражданских и некоторых видов военных потребителей различных государств в море, воздухе и на суше. В мире в эксплуатации находятся 26 цепей РНС LORAN-С, каждая из которых содержит от 3 до 5 станций; некоторые станции работают одновременно в двух цепях (рис.1.14) [8,15].
Рис.1.14. Зоны действия цепочек РНС LORAN-C и «ЧАЙКА»
Рабочие зоны цепей РНС LORAN-C перекрывают территории США и Канады и почти все побережье Североамериканского континента, Северную Атлантику, Скандинавию и Западную Европу, Северное и Норвежское моря, атлантическое побережье Франции и Восточную Атлантику, Средиземное море, центральный и северозападный районы Тихого океана, большую часть побережья КНР, весь Аравийский полуостров, районы Ближнего Востока, Красного моря, Персидского залива, залив Аден, часть побережья Индии. Общая площадь рабочих зон цепей РНС LORAN-C превышает 95 млн. кв. км.
В России в рабочей эксплуатации находятся четыре цепи системы «ЧАЙКА»:
-Европейская, в составе пяти станций, три из которых расположены в районах городов Брянск (ведущая), Петрозаводск, Сызрань (Россия) и две - за пределами России – Слоним ( Республика Беларусь) и Симферополь (Украина);
-Восточная, в составе четырех станций, расположенных в районах городов Александровск-Сахалинский (ведущая), Петропавловск-Камчатский, Уссурийск и Охотск;
-на Севере России функционируют две цепи в составе пяти станций, расположенных в районах г. Дудинка (ведущая), пос. Таймылыр, о. Панкратьева, г.Инта (ведущая-ведомая) и п. Туманный, причем три станции одновременно работают в обеих цепях.
Общая площадь рабочих зон всех цепей РНС «ЧАЙКА» составляет около 20 млн. кв. км.
Кроме того, в России имеются региональные цепи ИФРНС средней мощности. Завершены работы по созданию объединенной российско-американской цепи «ЧАЙКА»/LORAN-C в составе двух российских станций в районах городов Петропавловск-Камчатский и Александровск-Сахалинский и одной американской станции LORAN-C на о. Атту (США) [8].
PHC LORAN-C остается пока самой распространенной системой с наземным базированием.