

Схемы управляющих устройств разделяются на следящие, или беспоисковые, и ищущие, или поисковые.
Следящие схемы осуществляют автоподстройку в более широких пределах только тогда, когда скорость изменения промежуточной частоты меньше скорости срабатывания АПЧ. Поэтому следящие системы применяются в тех НРЛС, где не ожидается быстрых изменений частоты магнетрона или клистронного гетеродина.
В качестве управляющих устройств следящих схем применяют усилители постоянного тока или видеоусилители с пиковым детектором на выходе. Усилитель служит для повышения чувствительности канала АПЧ к изменениям частоты, то есть увеличения крутизны характеристики дискриминатора. Для получения постоянного управляющего напряжения постоянная времени выходной цепи дискриминатора C1R1 и C2R2 должны быть больше периода Tи следования импульсов.
6.4. Временная автоматическая регулировка усиления
Эффективным средством борьбы с помехами, возникающие от морского волнения, а также от близкорасположенных объектов, является временная автоматическая регулировка усиления (ВАРУ). (Уровень „автоматической” регулировки определяется вручную самим оператором).
ВАРУ необходима для выравнивания интенсивности сигналов от объектов, расположенных на разных расстояниях от антенны НРЛС, тем самым, обеспечивая одинаковое (равномерное) воспроизведение на экране индикатора целей, находящихся на различных дистанциях.
Дело в том, что энергия, отраженная от объектов, расположенных на небольшом расстоянии от НРЛС, на несколько порядков больше, чем от удаленных объектов. Поэтому чувствительный приемник НРЛС будет перегружен сигналами от близких объектов, в частности - от морских волн, в то время как эхосигналы от малоразмерных целей (например - буи, малые суда, катера, шлюпки) могут быть подавлены и своевременно не обнаружены.
ВАРУ формирует управляющее напряжение (напряжение смещения в каскадах УПЧ) так, чтобы усиление приемника возрастало с увеличением дистанции до объекта. Практически управляющее напряжение ВАРУ имеет экспоненциальную
характеристику.
Принцип формирования напряжения ВАРУ заключается в том, что одновременно с излучением зондирующего СВЧ импульса (рис.6.9), автоматически включается схема ВАРУ приемника, которая формирует импульс, состоящий из прямоугольного импульса (длительность которого равна длительности зондирующего импульса
τзи) и экспоненциальной составляющей. Прямоугольная составляющая сигнала ВАРУ запирает усилительные каскады приемника на время излучения мощного СВЧ импульса, а экспоненциальная составляющая плавно, по экспоненте, постепенно открывает усилительные каскады, тем самым увеличивает усиление приемника во времени (то есть – по дальности).
Рис.6.9.
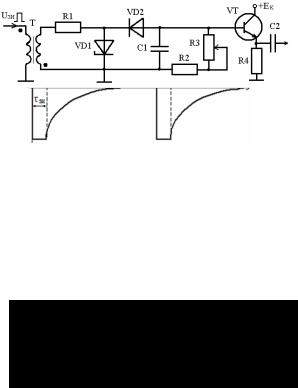
Одна из возможных схем формирования импульса ВАРУ приведена на рис.6.10. Схема запускается положительным запускающим импульсом. Отрицательный импульс со вторичной обмотки трансформатора Т через резистор R1 и диод VD2 заряжает емкость С1. (Диод VD1 стабилизирует импульс по амплитуде).
После окончания действия запускающего импульса емкость С1 разряжается через резистор R2 и потенциометр R3 на базу эмиттерного повторителя.
Рис.6.10.Схема формирования импульса ВАРУ
Таким образом, отрицательный импульс ВАРУ через разделительную емкость С2 поступает на управляющие входы усилительных каскадов УПЧ.
Оператор с помощью схемы ВАРУ, изменяя величину потенциометра R3, может отрегулировать усиление приемника таким образом, что объекты с одинаковой эффективной поверхностью отражения или рассеяния, находясь на разных дистанциях, будут воспроизводиться на экране ЭЛТ индикатора с одной и той же интенсивностью.
Другим важным достоинством ВАРУ является возможность устранения помех, вызываемых отражением от взволнованной поверхности моря, которые постепенно убывают с расстоянием и являются однородными для различных направлений. На рис.6.11 показаны примеры навигационного изображения индикатора САРП фирмы Raythеon.
На рис.6.11,а приведен снимок дисплея, на котором отображена радиолокационная картина во время движения судна между Данией и Швецией, с ветром, превышающим 15 узлов и бальностью моря 3 балла.
Диапазон шкалы установлен 6 морских миль. Усиление установлено 40 % от максимального значения, а органы управления подавления помех от волн и от дождя выключены. Обратите внимание, что помехи от морских волн простираются от 1,8 на 2 мили от собственного судна (центра развертки), а за ними - в направлениях от 320° до 35° отображаются беспорядочно разбросанные ледяные поля.
(Утолщенные линии в направлениях 155° и 230° представляют собой сигналы от радиолокационных маяков-ответчиков).
При включении органа управления подавления помех от дождя и от морских волн (см. рис.6.11,б), радиолокационное изображение становится достаточно "чистым".

а) |
б) |
|
Рис.6.11. |
Помехи от волнения моря и льдов исчезли. Все цели остаются, а цели, предварительно замаскированные в помехах видны достаточно ясно.
6.5. Малая постоянная времени
На работу НРЛС вредное влияние оказывают сигналы, отраженные от дождя либо мокрого снега, которые создают достаточно мощное отражение и поэтому создают интенсивную засветку на экране индикатора. Эхо-сигналы от осадков создают на индикаторе засветку в виде вуалеобразной, мягко окаймленной области, чем-то напоминающей вату, интенсивность которой зависит от интенсивности осадков (см. ниже рис.6.14,а). Поэтому эхо-сигналы от судов или береговой черты в зоне осадков могут быть не обнаружены на экране индикатора НРЛС.
Для борьбы с данными помехами, а в некоторых случаях и для увеличения разрешающей способности по дальности , а также для того, чтобы получить более четкое изображение береговых и портовых сооружений путем отображения только передних, в основном отражающих поверхностей сооружений, в приемниках НРЛС широкое распространение получила схема малой постоянной времени (МПВ), которая представляет собой дифференцирующую цепочку (см.рис.6.12).
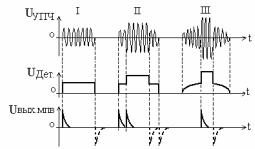
Рис.6.12.Схема дифференцирующей цепочки
Включается она после детектора, по желанию оператором НРЛС, органом управления, который обычно выводится на панель управления НРЛС.
Постоянная времени τмпв=C2 R2 |
приблизительно равна |
длительности зондирующего импульса τзи. Поэтому импульсы на выходе схемы получаются кратковременными (укороченными) положительной и отрицательной полярности. Длительность этих импульсов тем меньше, чем меньше установлена величина сопротивления резистора R2 (предусмотрена ее регулировка с панели управления). Диод VD2, подключенный параллельно резистору R2, срезает импульсы отрицательной полярности, а положительные видеоимпульсы создают на экране индикатора изображение.
На рис. 6.13 показаны временные диаграммы напряжений на
входе детектора UУПЧ, на его выходе UДет. и после цепи МПВ (Uвых.мпв) для трех различных ситуаций: при подаче на вход одиночного
отраженного импульса (ситуация I), двух сливающихся импульсов (ситуация II), а также при наложении на отраженный импульс длительной помехи, например дождя или мокрого снега, (ситуация III).
Рис.6.13.
Ситуация II на рис.6.13 указывает на то, что использование МПВ способствует увеличению разрешающей способности НРЛС по дальности. То есть, когда на вход видеодетектора приемника поступают два неразрешаемых по дальности импульсных сигнала на промежуточной частоте, то, подвергая дифференцированию суммарный видеоимпульс, на выходе цепочки МПВ получают два остроконечных импульса положительной полярности, создающих на экране индикатора две раздельно светящиеся отметки. (Импульсы