

4.4. Импульсный линейный модулятор
Упрощенная схема импульсного линейного модулятора приведена на рис.4.10.
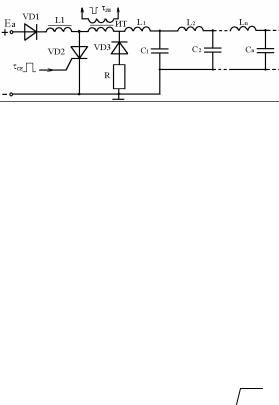
Рис.4.10. Упрощенная схема импульсного линейного модулятора
Импульсный линейный модулятор состоит из зарядного диода VD1, катушки зарядной индуктивности L1, накопительной линии LnCn, импульсного трансформатора ИТ тиристора VD2 и защитной цепочки
VD3-R.
Принцип работы импульсного линейного модулятора заключается в следующем: в исходном состоянии тиристор VD2 заперт [1,12]. В этом случае от высоковольтного источника питания +Еа, через диод VD1, зарядной индуктивности L1 происходит заряд накопительной линии (цепочки) LnCn до напряжения +Еа. При подаче
положительного τси отпирается тиристор VD2. Протекающий через него ток разряда уменьшает сопротивление тиристора VD2 и происходит разряд накопительной линии LnCn через первичную обмотку импульсного трансформатора ИТ.
Модулирующий импульс напряжения длительностью τзи, снимаемый со вторичной обмотки ИТ, подается на магнетрон. Длительность формируемого импульса зависит от параметров n -
звеньев накопительной линии LnCn, то есть τзи = 2п LC .
LC .
4.5.Импульсный магнитный модулятор
Вэтом модуляторе (схема на рис.4.11) в качестве коммутирующего элемента используется катушка нелинейной индуктивности.
Такие модуляторы называются импульсными магнитными модуляторами.
Импульсный магнитный модулятор состоит из катушки нелинейной индуктивности (дроссель) L1, накопительной емкости С1,
нелинейного трансформатора Т1, накопительного конденсатора С2 и импульсного трансформатора Т2.
Рис.4.11. Схема импульсного магнитного модулятора
Эта схема является развитием линейного импульсного модулятора, только длительность и амплитуда управляющего импульса, воздействующего на магнетрон, формируется постепенно, а именно – последовательно. В этой схеме используется свойство нелинейной индуктивности. (Если сердечник индуктивности L1 насыщен, его магнитная проницаемость мала и тогда его индуктивное сопротивление минимально. И – наоборот, при ненасыщенном состоянии магнитная проницаемость имеет большую величину, индуктивность в этом случае увеличивается, то есть увеличивается индуктивное сопротивление).
Принцип работы заключается в следующем. В исходном состоянии тиристор VD2 заперт. В этом случае накопительный конденсатор С1 через нелинейный дроссель L1 заряжается до напряжения +Еа. Если открыть VD2, емкость С1 через насыщенный дроссель L1, открытый VD2 разряжается на первичную обмотку нелинейного трансформатора Т1. Индуктируемое во вторичной обмотке Т1 импульсное напряжение заряжает накопительный конденсатор С2. К концу его заряда сердечник трансформатора Т1 насыщается (то есть сопротивление вторичной обмотки Т1 становится минимальным) и конденсатор С2 начинает разряжаться на первичную обмотку импульсного трансформатора Т2. Во вторичной (повышающей) обмотке этого трансформатора возникает
управляющий импульс τзи, воздействующий на катод магнетрона. Длительность τзи определяется временем разряда С2 через
первичную обмотку Т2 или τзи ≈ 0,7С2.R(первич.обмотки Т2).
С2 включают в схему, если необходимо сформировать τзи
≤0,1мкс. Если же τзи >0,1мкс, тогда вместо С2 в схеме используют формирующую линию, аналогичной схеме, приведенной на рис.4.6. (Такие типы модуляторов применяются в НРЛС серии “Наяда”, “Миус”) [12].