


отрицательной полярности срезаются диодом VD2 практически на нулевом уровне и на изображение на экране не влияют).
Ситуация III указывает на то, что эхо-сигналы, например, от капель дождя во всей зоне засветки имеют одинаковую интенсивность, в то время как эхо сигналы от целей, находящихся в зоне осадков, отличаются, как правило, большей интенсивностью изза лучшей отражающей способности.
Так как дифференцирующая цепочка «работает» по фронтам видеосигналов, а из рис.6.13 видно, что крутизна фронта от осадков мала, то в процессе дифференцирования остается только продифференцированные короткие импульсы от эхо-сигнала цели. То есть - на экране индикатора будет отображаться только цель.
Цепь МПВ оператор НРЛС включают по мере надобности.
На рис.6.14,а приведено изображение при выключенной МПВ. При постоянном ее включении уменьшается амплитуда видеоимпульсов на выходе приемника, поэтому изображение на экране НРЛС получается менее ярким. Из-за укорочения импульсов при дифференцировании теряется информация о протяженности целей, а береговая черта может иметь разрывы и опознавание ее становится затруднительным (рис.6.14,б). В таких случаях следует увеличивать усиление приемника, наблюдая одновременно за изображением навигационной обстановки на экране (рис.6.14,в).
а) |
б) |
в) |
Рис.6.14.
6.6. Логарифмический усилитель
При воздействии на вход приемника мощных сигналов или помех происходит его перегрузка. В частности, помехи от дождя или взволнованной морской поверхности маскируют полезные сигналы. Если амплитуды помех превышают амплитуду полезного сигнала, то

без специальных методов выделения сигнала его обнаружить невозможно. Затруднительно обнаружение полезного сигнала и в случае, если амплитуды помех ниже уровня максимальной амплитуды сигнала, но их количество велико, например, в условиях отражения от морских волн. Чтобы радиолокационный приемник не достигал насыщения при изменении входных сигналов в широких пределах, то есть обладал большим динамическим диапазоном усиления, в судовых РЛС применяют устройства, мгновенно регулирующие усиление приемника, предотвращая его насыщение.
Если изменения напряжения помех по характеру аналогичны изменениям шумов приемника, то напряжение этих помех можно «сжать» до уровня шумов приемника независимо от интенсивности помех.
Известно, что среднее значение выходного напряжения приемника Uвых уменьшается с ростом дальности, а величина флюктуации остается постоянной [10]. Для того чтобы ослабить помехи, необходимо флюктуации сжать до уровня собственных шумов приемника. Для этой цели в судовых НРЛС широко используют метод автоматической регулировки усиления приемника по логарифмическому закону. В связи с тем, что сжатие целесообразно только для мощных сигналов, флюктуации которых превышают уровень собственных шумов приемника, оптимальная амплитудная характеристика такого приемника (или усилителя) должна быть линейной для сигналов, лежащих ниже определенного уровня, и логарифмической для сигналов, превышающих этот
уровень. Тогда закон изменения выходного напряжения Uвых в зависимости от входного Uвх должен иметь следующий вид:
dUвых = a ,
dUвх Uвх
где: а— коэффициент пропорциональности. После интегрирования этого выражения получим
Uвых = a∫dUU вх = a lnUвх +С0 .
вх
Если обозначить через Uн и kн соответственно входное напряжение и коэффициент усиления каскада, соответствующие началу логарифмического участка амплитудной характеристики, как показано на рис. 6.13, то
Uвых.н =Uн kн = a lnUн +С0 . Отсюда - С0 =Uн kн −аlnUн .
Полагая коэффициент а=Uн kн = const, имеем
Uвых =Uн kн(ln Uвх +1) .
Uн
Тогда, при входном напряжении, равном Uвх<Uн, амплитудная характеристика приемника является линейной, а при условии, что Uвх>Uн, характеристика будет логарифмической (ЛАХ).
Рис.6.15. Пример ЛАХ
Принцип получения ЛАХ (см. рис. 6.16) заключается в следующем:
все каскады должны быть одинаковы; амплитудные характеристики каскадов до насыщения линейны;
при насыщении Uвых не зависит от Uвх каскада; суммирование осуществляется линейно.
Линейно-логарифмическими характеристиками могут обладать как УПЧ, так и видеоусилители приемников.
Возможны различные схемы, обеспечивающие получение логарифмической характеристики в УПЧ. Наибольшее распространение получила схема логарифмического УПЧ с последовательным детектированием сигналов отдельных каскадов усиления и их суммированием (рис.6.16) [24,28].
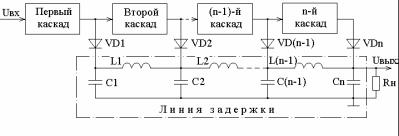
Рис. 6.16. Упрощенная схема логарифмического УПЧ
Суммарный сигнал выделяется на общей нагрузке Rн, с которой он далее поступает на дифференцирующую цепь с малой постоянной времени, как в линейном УПЧ.
Линия задержки позволяет всем импульсам с выхода диодов VD1—VDn приходить к нагрузке одновременно (учитывается задержка в каждом каскаде УПЧ). Амплитудная характеристика каскадов линейна для малых амплитуд и имеет ограничение при каком-то значении Еогр. Следовательно, импульсы большой амплитуды ограничиваются и на сумматор поступают с одинаковой амплитудой,
равной Еогр.
Входные импульсы различной амплитуды (в большом диапазоне изменения) ограничиваются в различных каскадах УПЧ (самый слабый — в последнем, самый сильный — в первом), и прирост амплитуды выходных импульсов при большой амплитуде происходит в меньшей степени, чем при малой амплитуде. В результате амплитудная характеристика состоит из отдельных линейных участков с постепенно уменьшающимся наклоном (см. рис. 6.15), приближаясь по форме к логарифмической характеристике.
Применение логарифмического УПЧ с дифференцирующей цепью, имеющей малую постоянную времени (МПВ), позволяет снизить уровень отражений от моря и дождя до уровня собственных шумов.
После дифференцирующей цепи с МПВ из выходного сигнала УПЧ исключается постоянная составляющая (удаляется среднее значение), и амплитуда помех от моря будет при любых расстояниях на одном уровне с собственным шумом приемника.
Следовательно, на выходе логарифмического УПЧ помехи значительно ослаблены, а амплитуды слабых и сильных отраженных импульсов выравниваются, поэтому регулировка усиления в процессе работы не требуется.
Для более эффективного подавления помех от моря также применяется ВАРУ, которая действует в нескольких линейных каскадах, включенных перед логарифмическим УПЧ.
Динамический диапазон входных сигналов логарифмических УПЧ может достигать 100 дБ, и более. Динамический диапазон выходных сигналов может быть сжат от 30…40 дБ до 3…4 дБ.
Преимуществом логарифмических усилителей является также их безынерционность, способность реагировать как на регулярные, так и на случайные помехи, способность мгновенно восстанавливать чувствительность после воздействия сильных помех.