


Рис.7.20. Функциональная схема формирования ПКД цифровым способом
Генератор тактовых импульсов вырабатывает опорные тактовые
импульсы с частотой f=8,09 МГц, (что соответствует D=0,01 мили), которые подаются в схему совпадения. На эту же схему поступает (см. рис.7.21) прямоугольный импульс Uви из блока формирования временного интервала tзад, длительность которого определяется выведенным для оператора потенциометром управления ПКД.
С выхода схемы совпадения последовательность импульсов (Uсс) подается в блок счетчика дистанции с цифровым отсчетом, на индикаторе которого отображается дистанция до цели с точностью отсчета, определяемой частотой тактовых импульсов (в данном примере - 0,01 миля). Одновременно фронтом импульса временного интервала формируется импульс ПКД короткой длительности.
Рис.7.21.
7.3. Формирование отметки курса
Практически все современные НРЛС обладают двумя видами ориентации – относительно диаметральной плоскости судна и относительно истинного меридиана (соответственно ориентация по “КУРСу” и по “СЕВЕРу”).
В любом из указанных видов ориентации необходимо формировать отметку курса (ОК). На рис.7.22 в качестве примера приведена одна из схем, с помощью которой формируется отметка курса.
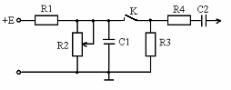
Рис.7.22. Схема формирования отметки курса
Принцип работы схемы заключается в следующем. Пока контакт “К” (он расположен в районе редуктора антенны) разомкнут, от источника питания +Е через резистор R1 происходит заряд емкости С1. В момент, когда ось диаграммы направленности вращающейся антенны совпадает с диаметралью судна, контакт “К” замыкается и конденсатор С1 разряжается на резистор R3. Отрицательный скачек этого напряжения через резистор R4 и разделительный конденсатор С2 подается на катод электронно-лучевой трубки, создавая при этом на индикаторе НРЛС яркую радиальную развертку. (Обычно за время действия этого импульса происходит 3…5 прямых ходов радиальной развертки. Этим самым создается яркая линия отметки курса).
Яркость свечения ОК регулируется потенциометром R2. Точное совпадение диаграммы направленности антенны с диаметральной плоскостью судна достигается путем регулировки контактной группы “К” в блоке антенны. В некоторых НРЛС в качестве контакта “К” используется геркон.