

позволяет найти значения составляющих вектора скорости потребителя и поправку на сдвиг частоты его опорного генератора относительно частоты генератора ИСЗ.
Найденные в ходе навигационных определений прямоугольные геоцентрические координаты хп, уп, zп должны быть преобразованы в координаты, обычно используемые потребителем при выполнении своих специфических задач. Такими координатами чаще всего бывают геодезические координаты φ- широта, λ- долгота и H - высота над уровнем эллипсоида (1942 г., 1990 г. или WGS-84) для воздушных и морских судов или координаты Гаусса-Крюгера для наземных объектов.
Связь координат хп, уп, zп c φ, λ, Н осуществляется посредством соотношений: [9].
хп = (N + H)cosφ·cosλ; |
|
уп = (N + H)cosφ·sinλ; |
|
zп = [(l -e2)N +H]sin φ, |
(14) |
где: N =a(1-e2sin2φ)-1/2 , e2=2α - α2
a - большая полуось эллипсоида, α- сжатие.
Поэтому, чтобы по известным хп, уп, zп найти φ, λ и Н необходимо решить систему нелинейных уравнений (14).
2.4. Структура навигационных радиосигналов НКА GPS
Передатчики НКА GPS излучают для определения места, два непрерывных модулированных радиосигнала на частотах L1- 1575,42
МГц (λ=19 см) и L2 - 1227,6 МГц (λ =24,4 см). (С 2005 г. НКА излучают еще и третью частоту L5 - 1176,45 МГц, предназначенную для специального применения) [9,15,18,19].
Все передаваемые НКА радиосигналы порождены одним стандартом частоты – 10,23 МГц и когерентно связаны между собой. (L1- 1575,42 МГц является 154 гармоникой частоты 10,23 МГц, а L2 - 1227,6 МГц – соответственно 120 гармоникой).
(Применение двух несущих частот позволяет исправить погрешность GPS, известную как ионосферная задержка).
Все спутники GPS передают радиосигналы на этих же частотах -L1 и L2, которые манипулированы по фазе (см.рис.2.7) по закону псевдослучайных двоичных цифровых последовательностей -
цифровыми кодами – двумя дальномерными кодами и
информационным сообщением.
Для того, чтобы приемники различали НКА – применяют для каждого НКА свой цифровой шифр – код, свойственный только данному номеру НКА. Это позволяет ПИ судна "узнать" номер НКА при измерении расстояния до него – то есть при измерении навигационного параметра.
Информационное сообщение (последовательность) содержит информацию об эфемеридах НКА, системном времени, поведении "часов" НКА, статусе сообщения и др.
Дальномерная последовательность предназначена для определения в приемоиндикаторе потребителя псевдодальности и других параметров, которые позволяют определить координаты объекта.
Существует два основных дальномерных кода:
-дальномерный псевдослучайный С/А-код – (Clear (Coarse)/Acquisition) - код свободного доступа;
-дальномерный псевдослучайный Р-код (P – Precise(Protected) ) – защищенный код.
Использование соответствующих кодов образует такие возможные режимы работы аппаратуры потребителей (АП) [9,13,19]:
SPS (Standart Positioning Service) для C/A-кода - обеспечивает гражданских потребителей.
PPS (Precise Positioning Service) для P-кода - обеспечивает доступ для санкционированных потребителей.
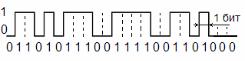
Как дальномерные, так и информационные коды формируются в НКА с помощью чередующихся прямоугольных импульсов (рис.2.9), так называемой М-последовательности (см. Приложение), в которых число 0 и 1 (число символов) может отличаться не более чем на один символ, что придает сигналу, при кажущейся хаотичности чередования символов, свойства широкополосного шума. Однако для различных кодов их длительность различная.
Рис.2.9
У информационного кода длительность импульса равна 20 мс, а их последовательность формируется с частотой 50 бит/с.
Импульсы С/А-кода формируются с частотой 1,023 МГц, а P- кода – с частотой 10,23 МГц. В этом случае длительность одного импульса (бита) С/А-кода будет равна: τбит=1/f =1/1,023 МГц= 0,9775 мкс, а для P-кода - один бит равен 0,09775 мкс.
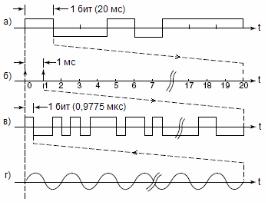
На рис.2.10 показан пример сложения С/А кода с информационными (навигационными данными) кодами и модуляция С/А кодом несущей частоты L1.
Рис.2.10.
Из рисунка видно, что информационный код, формирующийся с частотой 50 бит/с, обладает длительностью одного бита 20 мс (рис.2.10,а). В 1 мс этого бита (см. рис.2.10,б) «вкладывается» дальномерный С/А код (см. рис.2.10, в), при этом количество двоичных псевдослучайных импульсов (бит) 0 или 1 составит:
1мс:0,9775 мкс=1023 . Отсюда также следует, что длительность С/А кода равна 1000 мкс.
Как было сказано выше, дальномерными кодами модулируются несущие частоты L1 и L2. В приведенном примере – в 1бите С/А кода, который модулирует частоту L1 1575,42 МГц, вкладывается без изменения фазы : 1575,42.106 (Гц) х 0,9775. 10-6 (с) =1540 колебаний
(волн) (рис.2.10,г). А «длина» бита для L1 равна: 3.108(м/с) х 0,9775. 10-6 (с) =293,25 метров.
Аналогично рассуждая - для дальномерного Р-кода, у которого длительность бита псевдослучайной последовательности равна 0,09775 мкс, количество двоичных псевдослучайных импульсов (бит) 0 или 1 составит: 1мс:0,09775 мкс=10230, при этом «длина» бита Р-
кода для L1 равна: 3.108(м/с) х 0,09775. 10-6 (с) =29,325 метров.

Также, как и для С/А кода, длительность Р-кода равна 1000 мкс, а длительность 1 бита информационного (навигационного) кода равна
20 мс (см. рис.2.10,а).
Из приведенных выше расчетов видно, что потенциально точность определения места с Р-кодом в десть раз выше , чем с С/А кодом.
На рис.2.11.показан процесс модуляции несущих частот L1 и L2 кодовыми сигналами.
Рис.2.11. Модуляция несущих частот кодированными сигналами
Излучаемый сигнал L1 состоит из двух компонентов, которые находятся по фазе в квадратуре друг к другу (сдвинуты на π/2) для удобства их разделения.
Первая компонента представляет собой радиосигнал, который модулирован двумя двоичными последовательностями (дальномерным псевдослучайным Р-кодом) и информационной последовательностью передачи данных, складывающимися по модулю 2 (см. рис.2.11).
Вторая компонента – радиосигналтакже модулируется двумя двоичными последовательностями (дальномерный псевдослучайный С/А-код и информационная последовательность), складывающимися по модулю 2.
Сигнал L2 модулирован только P-кодом и обеспечивает доступ для санкционированных потребителей.
Это позволяет им исключить погрешности влияния ионосферы (т.к. используются сигналы на двух частотах). Соотношение погрешностей определения выходных параметров по C/A-коду и P- коду 10:1. Т.е., использование P-кода позволяет выполнить измерения с погрешностями, значительно меньшими, чем с C/A- кодом.
Основным навигационным дальномерным псевдослучайным кодом является точный Р-код (P – Precise).