

2. Спутниковые навигационные системы (СНС)
4-ого октября 1957 года в Советском Союзе впервые в мире был запущен первый искусственный спутник Земли (ИСЗ). Этот маленький спутник, по современным стандартам, весом приблизительно 84 килограмма, был выведен на околоземную орбиту с апогеем 942 км и перигеем 230 км. Период вращения вокруг Земли составлял 96 минут, (спутник находился на орбите до начала 1958 года). Так началась так называемая "Космическая эра" [13,15].
В 1957 г. группа советских ученых под руководством академика В. А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственных спутников Земли по результатам измерений доплеровского сдвига частоты сигнала, излучаемого с ИСЗ, в точке приема с известными координатами. Была установлена также возможность решения и обратной задачи - нахождение координат точки приема по измеренному доплеровскому сдвигу частоты сигнала, излучаемого с ИСЗ, параметры движения которого известны [1,2,3].
Использование ИСЗ в качестве радионавигационной опорной станции, координаты которой хотя и изменяются, но заранее известны для любого момента времени, позволило создать ряд проектов спутниковых радионавигационных систем (СРНС).
В настоящее время ИСЗ широко используются в различных областях народного хозяйства, в том числе и на морском флоте, где наибольшее распространение спутники нашли для целей навигации, морской радиосвязи, спасения на море, гидрометеорологии и др.
Использование спутниковых систем для этих целей становится возможным, если установить на ИСЗ соответствующую радиотехническую аппаратуру, которая должна быть связана по радиоканалу с судовой аппаратурой.
Для управления работой ИСЗ на Земле должна быть размещена сеть специальных станций. Назначение спутниковой системы существенно влияет на вид орбиты ИСЗ, а это в свою очередь определяет характеристики его радиотехнической аппаратуры.
Наземные станции управления располагают таким образом, чтобы можно было осуществлять регулярный контроль (слежение) за траекторией спутников и передачу необходимой информации на них. Для этого требуется обычно несколько станций слежения,
расположенных в различных районах земного шара, координационновычислительный центр и станции ввода данных на спутники об изменении их траектории. Обновление данных на ИСЗ должно выполняться с такой периодичностью, чтобы точность определения не выходила за гарантированные пределы.
Аппаратура на спутнике должна обеспечивать прием сигналов наземных станций (а в некоторых системах — и судового оборудования) и излучение собственных сигналов с мощностью, достаточной для работы во всей зоне радиовидимости ИСЗ. Излучаемые навигационными ИСЗ (НИСЗ) радиосигналы должны содержать информацию о его траекторных данных в течение всего времени работы системы. Для этого на НИСЗ имеется запоминающее устройство, способное хранить траекторные данные спутников, рассчитанные наземными станциями, до их следующего обновления. Антенное устройство ИСЗ обладает направленностью, позволяющей производить излучение сигналов со спутника к поверхности Земли.
Диапазон радиоволн, используемых в спутниковых РНС, выбирают исходя из условий наименьшего затухания в атмосфере и возможности применения антенн небольших размеров как на спутниках, так и на судах. Наилучшими в этом отношении оказываются метровые, дециметровые и сантиметровые волны, на которых можно передавать сигналы с широкой полосой частот, т. е. с большим содержанием информации.
Типы орбит ИСЗ
Высота орбиты ИСЗ определяется, прежде всего, площадью поверхности, на которой одновременно он должен быть виден, и связана с мощностью излучения передатчика спутника. При облучении большой поверхности необходима большая высота орбиты и, следовательно, большая мощность передатчика. При малой высоте мощность излучения может быть уменьшена, но в этом случае спутник быстро проходит над данным районом, что сокращает время определения по нему. Кроме того, при небольшой высоте из-за сильного торможения в атмосфере орбита спутника существенно изменяется и его срок службы сокращается. Поэтому, на высоту, меньшую 200 км, спутник запускать нецелесообразно.
Важная эксплуатационная характеристика СНС – размер зоны радиовидимости (величина обслуживаемой поверхности) ИСЗ. Под зоной радиовидимости понимается малый круг на поверхности Земли,
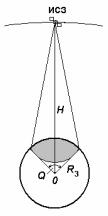
в пределах которого могут приниматься сигналы данного ИСЗ (см.
рис.2.1) [1,3].
Сферический диаметр Q зоны радиовидимости определяется уравнением
secQ/2 =1+H/R3,
где: H – высота орбиты ИСЗ; R3 – радиус Земного шара.
При движении спутника по орбите зона радиовидимости будет также перемещаться, образуя на поверхности Земли полосу радиовидимости, которая в силу суточного вращения Земли будет постоянно смещаться к западу.
Рис.2.1.Зона радиовидимости СНС
Это смещение d за время Тс, равное одному обороту спутника вокруг Земли, в функции широты φ и угла і наклонения орбиты определяется выражением:
d = 15 Тс sini·cosφ .
Величина обслуживаемой поверхности зависит от периода обращения спутника вокруг Земли Тс и частоты его пролета в данном районе, поэтому характер орбиты (ее вид и наклон) выбирается соответствующим образом.
Чем выше орбита, тем больше период обращения ИСЗ. При орбите, близкой к круговой, высота изменяется незначительно, расчет траектории спутника и слежение за ним проще, но вывод спутника на орбиту сложен. Эллиптическая орбита затрудняет слежение за
спутником и учет всех сил, действующих на него, однако вывод на орбиту оказывается более простым.
В зависимости от угла наклона орбиты i относительно плоскости экватора все спутники разделяют на экваториальные (i = 0), наклонные (0<i<90°) и полярные (i = 90°).
Экваториальные спутники все время вращаются в плоскости экватора. Низкие спутники перемещаются над поверхностью Земли и видны всегда в одной и той же полосе наблюдения, ширина которой, например, при высоте спутника 1000 км равна 3600 миль. Если ИСЗ выведен на круговую орбиту с высотой 35 870 км и вращается с запада на восток с периодом Тс =24 ч, он находится все время над одной и той же точкой Земли и с этой точки кажется неподвижным (стационарный спутник). Такой спутник виден на поверхности земного шара, ограниченной центральным углом 162°, от широты 81° Южного полушария до широты 81° Северного полушария. Практически один стационарный спутник в состоянии обслужить акваторию всего Тихого океана.
Три экваториальных стационарных спутника, расположенных в пространстве через 120° относительно друг друга, могут обеспечить передачу сигналов на всю поверхность Земли (за исключением полярных областей). Из пяти спутников, равномерно расположенных на стационарной орбите, можно одновременно использовать два. При определении места по таким спутникам достаточно знать их долготу. Для обслуживания также и полярных районов могут применяться квазистационарные (синхронные) спутники с суточным периодом обращения, но с небольшим (5°...7°) наклоном орбиты относительно плоскости экватора.
Наклонные спутники, с наклоном орбиты под углом 30° ... 60° к экватору, могут иметь орбиту высотой от нескольких сотен до нескольких десятков тысяч километров. При большой высоте они видны на большой поверхности Земного шара, поэтому даже при небольшом их количестве можно обслуживать весь Земной шар.
Полярные спутники вращаются в плоскости меридиана, но изза вращения Земли они периодически проходят над всеми районами Земного шара.
Если полярная орбита имеет высоту около 1000 км, торможение от атмосферы незначительно и спутники при массе несколько десятков килограммов могут существовать в течение десятков лет. Диаметр зоны видимости ИСЗ при такой высоте равен 3600 миль, т. е. одновременно он виден на достаточно большой территории. Обращение вокруг Земли осуществляется за 105 мин. Полоса