

привода поисково-спасательных средств по радиомаяку ближнего привода (АРБ-121).
2.1.4. Гидрометеорологические спутники
Специальная фотоаппаратура, установленная на спутниках, вращающихся на высоте нескольких сотен километров, выполняет качественное фотографирование поверхности Земли, моря, ледяного покрова, облаков. Изображение фотоснимка по радиосигналу передается на наземный приемный пункт или судно, где воспроизводится на фотобумаге или на бумаге с электромеханической записью. Наиболее эффективно эта информация используется на гидрометеорологических судах и ледоколах.
2.2. Методы определения места судна
Определение места судна с помощью ИСЗ предполагает решение трех отдельных задач, а именно:
-определение координат спутника (его траекторных данных ) в момент измерения навигационного параметра;
-относительную привязку, т. е. нахождение координат судна относительно спутника;
-вычисление географических координат судна.
Координаты спутника и географические координаты судна определяются в результате обработки в ЭВМ судового приемоиндикатора ,по специальной программе, траекторных данных ИСЗ и относительных координат ИСЗ — судно.
Для нахождения координат судна применимы, в большинстве своем, методы, которые используют обычно в наземных радионавигационных системах. Однако техническое решение определения места судна в спутниковых РНС достигается применением специальных методов определения.
Возможны следующие методы определения места с использованием ИСЗ [1,2,3]:
-угломерный — определяется угловая высота спутника;
-доплеровский – использование эффекта Доплера – определение сдвига частоты излученного ИСЗ радиосигнала относительно опорной (эталонной) частоты приемоиндикатора;
- радиально-скоростной — определяется скорость сближения спутника с судном, что равносильно использованию гиперболической РНС с изменяющейся длиной базы;
-разностно-дальномерный — определяется разность расстояний до одного и того же спутника в различных точках его движения по орбите, что равносильно использованию гиперболической РНС с перемещающейся базой. (Этот метод применялся в СРНС «Транзит»
и«Цикада»).
-дальномерный — определяется наклонная дальность до спутника. Разновидность дальномерного метода -
псевдодальномерный метод.
ВСРНС «Навстар» и «ГЛОНАСС» используют псевдодальномерный, а также доплеровский методы определения места судна.
2.2.1.Угломерный метод
Угломерный метод определения, являясь наиболее простым и близким к астрономическим методам, позволяет определить место по одному ИСЗ, так как за время полета спутника в зоне видимости происходит значительное изменение его высоты и азимута. Следовательно, за короткий промежуток времени можно получить несколько линий положения, пересекающихся друг с другом.
Судовое устройство, представляющее собой радиосекстан, с помощью остронаправленной антенны должно следить за спутником с точностью, равной долям угловой минуты. Размеры такой антенны (даже на сантиметровых волнах) становятся неприемлемыми для судовых условий, тем более, что ее основание должно иметь хорошую стабилизацию в пространстве. Расчет линий положения и места судна из-за быстрого перемещения спутника возможен лишь на ЭВМ. Все это вместе взятое не позволяет использовать угломерный способ определения места по ИСЗ в судовождении.
2.2.2. Доплеровский метод определения
При наличии на ИСЗ радиоаппаратуры, излучающей непрерывные немодулированные колебания высокой частоты f0, в приемник судового приемоиндикатора поступят колебания с частотой f, в общем случае не равной излучаемой частоте.
Объясняется это эффектом Доплера, который возникает при взаимном перемещении источника и приемника колебаний.
Если источник и приемник приближаются друг к другу, то f>f0, если же расстояние между ними увеличивается, то f<f0.
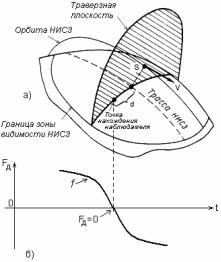
Рис.2.2. Доплеровский эффект: а) движение спутника;
б) характер изменения частоты Доплера
Чем больше скорость изменения расстояния, тем больше принимаемая частота f отличается от излучаемой f0.
Эталонный генератор с частотой f0 , установленный в приемоиндикаторе, дает возможность получить разностную доплеровскую частоту
FД= ± (f - f0) .
Следовательно, прием колебаний от приближающегося спутника дает доплеровскую частоту положительного знака, а прием от удаляющегося спутника — доплеровскую частоту отрицательного знака.
В момент нахождения ИСЗ на кратчайшем расстоянии S от точки наблюдения (судно на «траверзе спутника») частота FД = 0, но скорость ее изменения наибольшая (см. рис.2.2,а).
Таким образом, зафиксировав момент времени, при котором доплеровская частота равна нулю (при нахождении ИСЗ на
минимальном удалении от наблюдателя), можно найти одну линию положения, а зная скорость изменения частоты,— и другую линию. Первая является линией направления, перпендикулярной к трассе ИСЗ в точке кратчайшего расстояния, вторая — окружностью с определенным значением удаления от трассы. Рассмотренный метод определения, называемый «траверзным», не используется в СРНС, так как дает всего две взаимно пересекающиеся линии положения за один пролет ИСЗ.
Сетку из ряда линий положения за один пролет навигационного ИСЗ обеспечивают доплеровские радиально-скоростной и разностно-дальномерный методы.
2.2.3.Радиально-скоростной метод
В общем случае значение доплеровской частоты от частоты излучения сигнала навигационным спутником и скорости его движения определяется выражением
FД= f - f0 = f0(Vr/c)= Vr/λ= Vcosα/ λ, |
(7) |
где: Vr= Vcosα — радиальная составляющая скорости спутника относительно судна (V = 7,35 км/с — скорость движения спутника на орбите при ее высоте 1000 км; α — угол между вектором скорости спутника и направлением на судно);
с— скорость распространения радиоволн;
λ— длина волны, соответствующая колебаниям с частотой f0.
Взоне видимости ИСЗ (см. рис. 2.3), излучающего колебания с
частотой f0, образуются конические поверхности положения, которые, пересекаясь с поверхностью земного шара, создают линии положения.
Отличительной особенностью этих линий положения, называемых изодопами, является постоянное значение частоты Доплера. Поскольку, в соответствии с уравнением (7), величина
частоты FД для данного ИСЗ зависит от угла α, каждая изодопа имеет свою частоту.
Нулевое значение доплеровской частоты получается у изодопы, которая находится под спутником (α = 90°). По мере удаления от спутника в пределах зоны видимости на поверхности Земли угол α уменьшается, поэтому изодопы имеют все большее значение частоты Доплера.
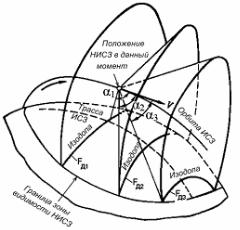
Рис.2.3. Образование изодоп в спутниковых РНС
В первом приближении изодопы являются гиперболами, поэтому при уменьшении угла α они имеют все более выпуклую форму. Изодопа с FД = 0 (при α= 90°) является дугой большого круга на Земле.
В результате движения спутника на орбите происходит перемещение изодоп по поверхности Земли, что приводит к взаимному пересечению линий положения, соответствующих различным местонахождениям ИСЗ на орбите.
На более выпуклые гиперболы от первоначального положения ИСЗ накладываются менее выпуклые гиперболы, соответствующие текущему положению спутника. Место судна находится в одной из двух точек пересечения, расположенных по разные стороны от трассы спутника. При угловой высоте спутника не более 70° двузначность местонахождения судна устраняется счислением (достаточно знать, где проходит орбита спутника, к востоку или западу от меридиана судна). Для определения с повышенной точностью за время пролета ИСЗ в зоне видимости производят ряд измерений и получают место судна в точках пересечения нескольких изодоп.
При радиально-скоростном доплеровском методе следует, что взятые друг за другом в течение непродолжительного отрезка времени линии положения представляют собой гиперболы РНС с переменной длиной базы [1,2,3].