


2. Отражающие свойства объектов
Если облучаемый объект по своим электрическим параметрам (например, проводимости, диэлектрической постоянной) существенно отличается от этих же параметров среды распространения радиоволн, то в нем возникают токи СВЧ, создающие вторичное (переизлучаемое) поле. Часть этой энергии снова попадает в антенну НРЛС.
Отражающие свойства объектов влияют на дальность радиолокационного обнаружения. Зависят, в основном, от материала объекта, его формы и размера, от длины облучаемой волны.
Количественно отражающие свойства объекта оцениваются эффективной поверхностью отражения (ЭПО) объекта.
ЭПО – это некоторая условная (эквивалентная) площадка Sэ, которая, будучи помещенной, на облучаемый объект перпендикулярно направлению распространения падающей СВЧ радиоволны, создает на входе приемника НРЛС плотность потока
мощности отраженного сигнала равной |
плотности отраженной |
мощности от реального объекта. |
|
Количественно ЭПО определяется таким образом. |
|
Допустим, на объект площадью S |
(см. рис.2.1) падает |
мощность плотностью П1. (Падающая плотность мощности
определяется выражением П1=Рп/Sa |
, где Рп - мощность |
|
передатчика, а |
Sa - площадь раскрыва антенны). Под ее |
|
воздействием объект переизлучает мощность Р, равную |
||
|
Р=S П1. |
(28) |
Рис.2.1
Только часть этой энергии попадает обратно в антенну НРЛС плотность мощности, которой определяется уравнением
П2 = |
PG |
, |
(29) |
|
4πD2 |
||||
|
|
|
где: G - коэффициент направленного действия антенны,
4πD2 - площадь сферы радиусом D ( D - |
расстояние от |
|
цели до антенны НРЛС). |
|
|
Подставив уравнение (28) в уравнение (29), получим: |
|
|
П2=П1 ·GS/(4πD2) |
. |
(30) |
В полученном уравнении обозначим GS = Sэ, |
|
|
где Sэ- эффективная поверхность отражения (ЭПО). Таким образом, |
||
уравнение (30) можно записать в виде П2=П1 Sэ /(4πD2). |
|
|
Из этого уравнения определяется ЭПО: |
|
|
Sэ= 4πD2 (П2/П1) |
. |
(31) |
Из полученного уравнения видно, что для определения ЭПО необходимо знать расстояние до цели, а также падающий и отраженный поток мощности.
ЭПО относительно легко можно вычислить для объектов простых форм – металлического листа, шара, уголкового отражателя. При этом допускается, что они выполнены из однородного идеально проводящего материала (то есть – не имеют потерь).
ЭПО сложных объектов – судов, навигационных знаков и других целей определяется только экспериментально.
2.1. ЭПО простейшей формы |
|
1. Пассивный полуволновый вибратор - |
Sэ=0,86λ2. |
2. Плоский металлический лист, размеры которого значительно
больше длины волны λ и он расположен перпендикулярно направлению распространения радиоволны:
|
S |
2 |
|
|
|
|
|
(32) |
|
|
2 |
|||
Sэ = 4π |
|
. |
||
|
λ |
|
|
|
Например, при S =1 м2, |
λ=3,2 см Sэ= 12265 м2, |
а при λ= 8 мм |
||
– Sэ = 196250 м2.
При отклонении угла облучения от нормали ЭПО резко уменьшается. В этом случае она определяется уравнением вида:
|
|
|
|
|
|
|
|
2πa sin α |
2 |
|
|
|
S |
2 |
|
|
|
sin |
|
|
|
|
|
|
|
λ |
|
||||||||
|
|
|
cos |
2 |
λ |
|
|
|
, |
||
|
2 |
|
|
|
|
||||||
Sэ = 4π |
|
|
|
2πa sin α |
|
||||||
|
λ |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
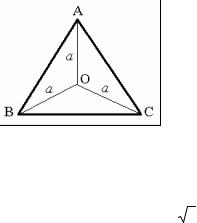
где a- сторона облучаемой плоскости, α- угол облучения. 3. Уголковый отражатель со стороной a (см. рис.2.2).
Для увеличения интенсивности отражения малоразмерных объектов (например - буев, вех и др.) в достаточно большом секторе облучения применяются искусственные уголковые отражатели.
Рис.2.2.
ЭПО |
уголкового |
отражателя, |
у |
которого |
AOB BOC AOC , приблизительно равна площади мнимого шестиугольника, вписанного во внешний контур отражателя,
определяется уравнением |
S = a / 3 . |
||
Тогда, согласно формуле (32), |
ЭПО уголкового отражателя |
||
|
a4 |
|
|
будет равна Sэ = 4π |
|
. Например, при а =0,4 м и λ= 3,2 см |
|
2 |
|||
|
3λ |
|
|
Sэ=104,7м2. Если необходимо усилить интенсивность отражения во всех направлениях, то уголковые отражатели устанавливают группами (по окружности).
На рис.2.3 изображен пятиугольный комплект отражателей, смонтированных на буе.

Рис.2.3. Комплект отражателей, смонтированных на буе
Существенное значение имеет точность выполнения и жесткость конструкции уголковых отражателей. Например, отклонение
внешнего края плоскостей отражателя на λ/3 от теоретического значения уменьшает мощность отраженного сигнала примерно на
50%.
4. Шар радиусом R .
а) При R››λ Sэ=πR2.
б) При R‹‹λ, что характерно для капель дождя, тумана и других
|
|
2πR 4 |
|
2 |
|
|
целей, ЭПО определяется уравнением |
Sэ = 4 |
|
|
πR |
|
. |
λ |
|
|||||
|
|
|
|
|
|
|
2.2. ЭПО групповых объектов
Групповыми называются такие объекты, которые находятся и облучаются в пределах разрешающей площадки (см. уравнение 12).
В этом случае принимаемые отраженные сигналы представляют собой совокупность нескольких отраженных сигналов, отличающихся друг от друга по фазе и амплитуде, при этом их фазы и амплитуды могут между собой суммироваться или вычитаться.