

4.5. Сегмент потребителей СРНС ГЛОНАСС
Координаты потребителя в системе определяются посредством их расчета по псевдодальностям (ПД) до НКА. Псевдодальности Di рассчитываются по временным задержкам Ti, сигнала по трассе "i-й НКА - потребитель" и известной скорости распространения радиоволны:
Di= cTi..
Тi измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приемнике копий этих кодов с учетом априори известных моментов излучений сигналов НКА. При этом могут использоваться также соответствующие измерения разностей фаз несущих частот.
Сегмент потребителей включает приемники (аппаратуру потребителей) ГЛОНАСС и сообщество самих пользователей.
АП принимает сигналы ГЛОНАСС (практически все современные образцы АП принимают также и сигналы системы GPS), обрабатывает их, измеряет и определяет радионавигационные параметры (псевдодальность и приращение псевдодальности, т.е. псевдоскорости), вычисляет геоцентрические координаты X, Y, Z и на их основе - геодезические координаты и высоту над опорным эллипсоидом в системе координат ПЗ-90 [9] (возможна также работа в системах WGS-84, СК-42, Гаусса-Крюгера и др.), поправку к местной шкале времени T΄ относительно системного времени ГЛОНАСС (GPS) и составляющие вектора скорости, а также скорость ухода (нестабильность частоты) местной ШВ f΄.
АП производится для навигации подвижных объектов (самолетов, вертолетов, морских и речных судов, автотранспорта), для определения координат при геодезических и землеустроительных работах, для синхронизации систем связи, энергосистем и т.д.
Конструкция АП существенно зависит от назначения [9,25].
5.Точностные характеристики СРНС
Потенциально спутниковые РНС способны обеспечить определения координат места объекта с погрешностью до 10 м и скорость объекта с погрешностью до 0,03м/с. На точность определения координат места объекта влияет точность временной шкалы ИСЗ; точность эфемеридных данных; ионосферные и тропосферные эффекты; задержки сигналов в радиотракте
передающей и приемной аппаратуры, шумы приемника, разрешающая способность измерительной схемы приемной аппаратуры, ошибки квантования [4,9,15].
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
Уравнение навигационного параметра псевдодальности имеет вид
Di = D +c tЗі +с tp +c tCi ,
где: Di - измеренная псевдодальность до КАi; D - истинная дальность до КАi;
∆tЗі - поправка на рефракцию PC в ионосфере и тропосфере; ∆tp - поправка на рассогласование шкал времени КА и ПИ (АП);
∆tCi . - поправка на рассогласование шкалы времени КА и всей системы GPS.
Эти поправки указаны в Специальном Навигационном Сообщении в радиосигнале от КА, где указаны:
признаки нормальной работы системы; информация, обеспечивающая синхронизацию по времени
работы ПИ на судах (временные метки) ∆tр;
поправка рассогласования шкалы времени КА и всей системы СРНС (обсерватории времени), ∆tCi;
поправка, учитывающая рефракцию PC в ионосфере и
тропосфере ∆tЗі;
эфемериды космических аппаратов (их положение) и параметры их орбит;
ключевое слово - код Голда (определяет, какой КА позволяет работать в режиме SPS для гражданских ПИ).
5.1.Погрешности измерений навигационного параметра (псевдодальности) и их влияние на точность места судна
На точность определения места судна сказываются многие факторы, а именно – факторы технического характера, состояние атмосферы, метеорологические условия, взаимное расположение НКА и другие факторы. Наиболее характерными из них являются следующие:
1.Прогноз эфемерид - это прогноз наличия КА и их положения на орбитах. Обычно КА занимают положение на орбите ±1,5 м.
2.Расхождение временных шкал данного КА и всей cистемы GPS.
На КА установлены высокоточные генераторы - рубидиевые или цезиевые -атомный стандарт частоты (АСЧ -уход за сутки 10-12-10-13 с)
и водородный стандарт (уход до 10-14-10-15 с). Уход контролирует наземный КИП, и рассчитываются коэффициенты полинома функции ухода шкалы времени и вводятся в данный КА.
Расхождение временных шкал КА и ПИ определяется при измерениях D до 4-го КА. Все это приводит к возникновению систематической ошибки определения координат около 0.6 м.
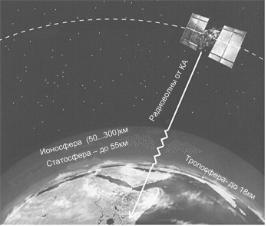
3.Погрешность за распространение PC в ионосфере и тропосфере (рефракция, преломление) обусловлена искривлением траектории радиолуча за счет рефракции в ионосфере и тропосфере
(см.рис. 5.1).
Тропосфера [16,17] - от поверхности Земли до высоты 10 км в высоких широтах, и до 18 км – у экватора. В ней 4/5 всей массы
атмосферы - почти весь водяной пар |
и в ней развивается |
облачность. |
|
Погрешность зависит от t°, давления, |
влажности воздуха. Она |
учтена и равна ≈ 0,5 м. |
|
Стратосфера - далее до высоты 50-55 км. В ней характерен рост t° с высотой.
Pис. 5.1.Распространение радиоволн в атмосфере от НКА к ПИ
Ионосфера - верхние слои атмосферы от 50-80 км до ~200 км. Верхняя граница ионосферы – внешняя граница магнитосферы
Земли (см.рис.5.2).

Рис.. 5.2. Гелиосфера, магнитосфера и атмосфера Земли
В ионосфере газ находится частично в ионизированном состоянии вследствие воздействия ультрафиолетового, рентгеновского и корпускулярного излучения Солнца, а так же космических лучей.
Ионосфера содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Эти же электроны влияют на рефракцию радиолуча.
Рефракция радиолуча зависит от диэлектрических свойств среды (максимальное - в тропиках), от магнитных бурь - она минимальна при нахождении КА в зените (hs ~90°), от частоты сигнала. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках). Линейные комбинации двухчастотных измерений не содержат ионосферных погрешностей первого порядка. Кроме того, для частичной компенсации этой погрешности может быть использована модель коррекции, которая аналитически рассчитывается с использованием информации, содержащейся в навигационном сообщении. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10 м [4,12,15].
4.Многолучевость сигнала в районе приема - интерференция,
наложение радиоволн.
Радиоволна, достигнув Земли, отражается от водной поверхности, от суши. Амплитуда и фаза суммарного сигнала при
приеме будут искажены, что приводит к погрешностям. Зависят погрешности от угла падения луча радиосигнала и возрастают с увеличением высоты КА над горизонтом, поэтому антенна ПИ ориентирована на морских судах на верхнюю полусферу и влияние боковых лепестков невелико
(до 1 м).
5. Многопутность распространения сигнала.
Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измеренное расстояние оказывается больше действительного. Аналитически данную погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение антенны приемника относительно препятствий. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2.0 м.
6.Точность работы аппаратуры потребителя АП (качество ПИ).
В основе лежит выделение "полезного" сигнала на фоне шумовой составляющей. Она может в десятки раз превышать полезный сигнал. Выделение полезного сигнала на фоне шумов существенно усложняет аппаратуру потребителя ПИ. Для защиты антенны от помех излучаемый КА радиосигнал формируется как
псевдослучайная последовательность. Существует две разновидности радиосигнала: C/A-код - легко обнаруживаемый, P-код - санкционированный или точный. При соотношении сигнал/шум, равном 30 дБ/Гц, и ширине полосы пропускания, равной 1 Гц, среднеквадратическая погрешность (по качеству) измерения дальности до КА составляет 10,8 м для С/А-кода и 1,08 - для Р-кода
[12].
7.Влияние грозы на сигналы GPS.
Существует несколько возможных эффектов от влияния грозы на GPS сигналы и приемники. Наибольшее влияние оказывает прямое или очень близкое попадание молнии в GPS приемник, которое может повредить его. Для защиты постоянно установленного базового GPS приемника требуется использование громоотвода.
Второй возможный эффект от грозы - электромагнитный шум, генерируемый множественными молниями вблизи (а иногда и достаточно далеко при сильной грозе), который может вносить помехи в радиосвязь дифференциальных систем GPS. Среднечастотные сигналы радиомаяков, излучающих дифпоправки, подвержены различным помехам, в отличие от спутниковых сигналов

дифкоррекции, на которые влияет только очень близкий грозовой фронт.
8.Влияние дождя, снега и мокрого снега на работу GPS.
Дождь, снег или мокрый снег в пространстве между приемником и спутником обычно не оказывают заметного влияния на GPS сигнал. Однако снег или лед, скапливающиеся на GPS антенне поглощают часть сигналов, достигающих GPS антенны.
9.Влияние линий электропередач на сигнал GPS.
В Северной Америке частота тока в линиях электропередачи 60Гц (в Европе - 50Гц). Энергия гармонических колебаний быстро падает на расстоянии при увеличении частоты. Таким образом, линии электропередачи сами по себе оказывают очень незначительный эффект на GPS сигнал, однако их шумовое излучение может оказывать помехи на принимаемые сигналы дифференциальной коррекции для DGPS приемников от радиомаяков. Эти помехи исчезают при удалении от линии электропередачи.
10. Ошибки вычисления орбит в ПИ.
Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м.
11. Геометрическое расположение спутников.
При вычислении суммарной ошибки необходимо еще учесть взаимное положение потребителя и спутников рабочего созвездия
(см. рис.5.3.)
Для этого вводится специальный коэффициент позиционного (геометрического) фактора ухудшения точности PDOP (Position Dilution оf Precision), на который необходимо умножить все перечисленные
а) б) Рис.5.3.Возможные направления приема радиосигналов от НКА в ПИ
выше ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит от взаимного расположения спутников и приемника.
Она обратно пропорциональна объему мнимой фигуры, которая будет образована, если провести единичные векторы от приемника к спутникам.
На рис.5.3,а приведен пример удачного расположения КА, от которых принимаются сигналы ПИ, а на рис.5.3,б – неудачное расположение КА.
В русскоязычной литературе по спутниковой радионавигации геометрический фактор обозначают буквой Г – (G - Geometric – англоязычное обозначение) [9,27].
Величина Г - геометрический фактор точности, который характеризует геометрическое расположение НКА относительно приемной антенны ПИ судна. В процессе приема сигналов от НКА их геометрическое положение непрерывно меняется. Некоторые НКА уходят за горизонт, другие появляются. В судовых ПИ решается задача выбора из общего числа наблюдаемых НКА оптимального созвездия из 3-4 НКА (см.рис.5.3), обработка сигналов которых обеспечивает минимальное значение геометрического фактора точности Г.
Геометрический фактор определяется при решении уравнений линии положения линейного вида, которое выполняется в ПИ по нескольким НКА :
Различают несколько геометрических факторов.
ГГ - геометрический фактор в двухмерном пространстве (на плоскости) по φ и λ; (англоязычное обозначение HDOP - Horizontal
Dilution of Precision) [9,18,19].
ГГ2 = Гϕ2 + Гλ2
(Смысл слова Dilution - разбавление, ослабление. При измерении D от НКА до ПИ точность обсервации тем хуже, чем больше геометрический фактор).
В трехмерном пространстве - Гпр; (англоязычное PDOP - Position
Dilution of Precision).
Гпр2 = ГГ2 + Гh2 = Гϕ2 + Гλ2 + Гh2 ,
где: Гh - геометрический фактор определения высоты потребителя
(ПИ); (англоязычное VDOP - Vertical Dilution of Precision).
Тогда, значение общего геометрического фактора Г в пространстве и времени будет определяться как
Г2 = Гпр2 + ГТ2 + Гϕ2 + Гλ2 + Гh2 + ГТ2 .