

3.1.3. Сегмент потребителей
Сегмент потребителей включает приемники (аппаратуру потребителей - АП) GPS и сообщество самих пользователей.
АП принимает сигналы GPS, обрабатывает их, измеряет радионавигационные параметры (псевдодальность и приращение псевдодальности), определяет на их основе координаты и составляющие скорости в геоцентрической системе координат, поправку к местной шкале времени T'GPS относительно системного времени GPS и ее уход, а затем геодезические координаты и высоту над опорным эллипсоидом в системе координат WGS-84 (φ, λ, H) и составляющие вектора скорости (VN ,VE , VH). Возможно также определение координат в какой-либо иной системе, например - Меркатора, Гаусса-Крюгера и т.д.
АП производится для навигации подвижных объектов (самолетов, вертолетов, морских и речных судов, автотранспорта), для определения координат при геодезических и землеустроительных работах, для синхронизации систем связи и т.д. Конструкция АП существенно зависит от назначения. Ее стоимость находится в диапазоне от ста до нескольких десятков тысяч долл. США [25].
3.1.3.1.Основные задачи, решаемые аппаратурой потребителя
К числу потребителей СРНС второго поколения относятся наземные и морские объекты (подвижные и неподвижные), летательные аппараты (высокодинамичные и низкодинамичные) и др.
В зависимости от потребителя, требования к точностным характеристикам, числу измеряемых координат и составляющих скорости, допустимому времени вхождения в синхронизм, массогабаритным показателям и стоимости, типы аппаратуры потребителя колеблются в широких пределах. Для наземных и морских объектов достаточно ограничиться измерением двух координат и двух составляющих скорости. Для летательных аппаратов число измеряемых координат и составляющих скорости возрастает до трех. Поэтому номенклатура модификаций бортовой аппаратуры весьма обширна [25].
Основными задачами, решаемыми аппаратурой потребителя, являются:
- выбор рабочего созвездия ИСЗ, поиск и опознавание навигационных сигналов ИСЗ,
-введение в синхронизм систем слежения по времени запаздывания и фазе несущей частоты дальномерных сигналов, измерение времени запаздывания и доплеровского сдвига частоты,
-выделение и расшифровка содержания навигационного (информационного) сообщения,
-расчет координат ИСЗ на момент навигационных измерений,
-решение навигационной задачи (определение координат и составляющих вектора скорости потребителя, поправок к сдвигу шкал времени и частот),
-отображение вычисленных данных на информационном табло.
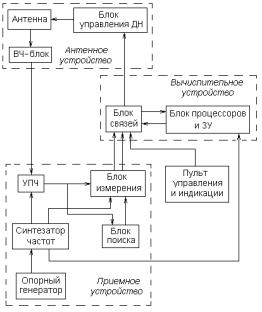
Упрощенная структурная схема аппаратуры приемника потребителя представлена на рис.3.5 [4].
Рис.3.5. Упрощенная структурная схема приемника
Она состоит из антенного, приемного и вычислительного устройства, а также из пульта управления и индикации.
Антенное устройство содержит собственно саму антенну и ВЧблок. (Для потребителей СРНС, к качественным показателям которых предъявляются особенно высокие требования, применяют антенны с управляемой ДН).
Антенное устройство обеспечивает прием, предварительную частотную селекцию и усиление сигналов. ДН антенны в простейшем случае близка к полусфере.
Приемное устройство представляет собой супергетеродинный приемник, где осуществляется первичная обработка сигналов. Гетеродинные частоты формируются из колебаний опорного генератора с помощью синтезатора частот. С усилителя промежуточной частоты (УПЧ) сигналы поступают на блоки поиска (по времени запаздывания и частоте) и измерения. После завершения поиска в блоке измерения происходит захват сигналов системами автоматической подстройки частоты (АПЧ), фазы (ФАПЧ) и времени (АПВ). По завершении переходных процессов в следящих системах вырабатываемые в блоке измерения значения РНП (псевдодальности, псевдоскорости), а также код информационного сообщения Dc(t) поступают на вычислительное устройство.
Вычислительное устройство содержит блок связей и собственно вычислитель, который на рис. 3.5 упрощенно представлен в виде блока процессоров и запоминающих устройств (ЗУ). Основой вычислителя являются микропроцессоры, дополненные модулями памяти. В зависимости от модификации аппаратуры в вычислитель обычно входит от одного до четырех микропроцессоров.
Пульт управления и индикации содержит клавиатуру управления и табло индикации, на котором по желанию оператора могут отображаться измеряемые координаты, составляющие вектора скорости, результаты расчетов сервисных задач (расчетное время прибытия в пункт назначения, отклонения от заданного маршрута и т. п.), результаты тестовой проверки отдельных блоков и всей аппаратуры в целом.
3.1.3.2.Модификации аппаратуры потребителей
Можно выделить три основные модификации аппаратуры потребителей. Аппаратура первого класса предназначена для быстрых высокоточных навигационных определений координат места и скорости, а также поправок времени высокодинамичных потребителей в условиях сложной помеховой обстановки. Упрощенная структурная схема аппаратуры потребителей первого класса представлена на рис.3.6 [4].
В ее состав входит пятиканальный блок АПВ, АПЧ и ФАПЧ. Четыре канала используются для слежения за несущими частотами (ИСЗi — 1,2,3,4), один канал (АПВ) обеспечивает последовательное
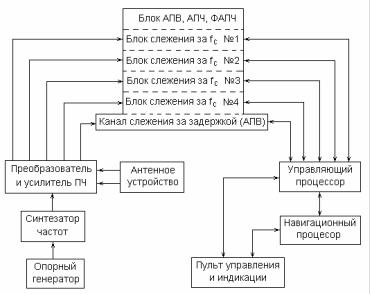
слежение за задержками сигналов Р-кода и С/А-кода на частотах 1227,6 МГц и 1575,42 МГц поочередно для всех четырех ИСЗ.
Аппаратура потребителей второго класса предназначена для низкодинамичных объектов [4]. Это дает возможность ограничиться последовательным слежением за несущей частотой четырех ИСЗ при сохранении того же режима АПВ, как и в аппаратуре первого класса. Сокращение числа систем АПЧ и ФАПЧ до одной заметно упрощает аппаратуру потребителей и снижает ее стоимость.
Рис.3.6. Упрощенная структурная схема приемника СРНС первого класса
Аппаратура потребителей третьего класса удовлетворяет требованию минимальной стоимости и рассчитана на прием лишь сигнала С\А -кода на частоте 1575,42 МГц, а также поочередное определение РНП по рабочим ИСЗ. Сигнал С\А -кода по сравнению с сигналом Р-кода имеет в десять раз большую длительность элементарного символа кода, что сказывается на значении ошибки измерения псевдодальности. Кроме того, отказ от использования сигнала частоты 1227,6 МГц не позволяет компенсировать ошибку, обусловленную изменчивостью условий распространения радиоволн. Все это существенно снижает точность навигационных измерений.