

Антенно-фидерное устройство (АФУ) состоит из волноводного тракта, по которому через антенный переключатель из передатчика подаются мощные СВЧ колебания в антенну, а при приеме антенной отраженных сигналов от объектов, через АП поступают в приемник. Антенны НРЛС обладают, как правило, остронаправленным излучением (приемом) СВЧ импульсов.
Приемник усиливает принятые антенной отраженные сигналы от цели, (эпюра «г»), преобразует их в видеосигналы (эпюра «д») и затем подает их в индикаторное устройство.
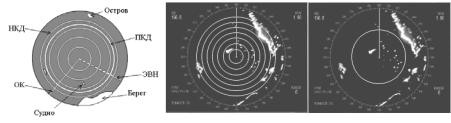
В индикаторе с помощью воспроизводящего устройства (электронно-лучевой трубки (ЭЛТ) или жидкокристаллического монитора) полученные в приемнике видеосигналы преобразуются в видимое изображение; формируются дополнительные информационные метки – неподвижные кольца (круги) дальности – НКД, подвижный круг дальности – ПКД, отметка курса – ОК, электронный визир направления – ЭВН и некоторые другие вспомогательные метки (в зависимости от модели НРЛС).
Из индикатора, как правило, осуществляется управление работой НРЛС и контроль ее работоспособности.
Указанные выше сигналы и метки показаны на рис.1.5.
а) |
б) |
Рис.1.5. Общий вид навигационного изображения на ЭЛТ индикатора: а) – условный; б) - реальное радиолокационное изображение на на шкале 6 миль, ориентация изображения – по КУРСу с НКД и ПКД соответственно
Блок ориентации и передачи данных предназначен для передачи углового положения антенны в индикатор, формирования на ЭЛТ необходимой ориентации изображения и вида движения.
1.2. Радиолокационное изображение на ЭЛТ индикатора

Перед рассмотрением последующего материала, необходимо заметить, что на воспроизводящем устройстве (индикаторе) радиолокационное изображение (см. рис.1.6,а) практически всегда полностью не соответствует береговой черте, очертанию островов и т.п., отображаемых на навигационной карте (см. рис.1.6,б).
а) б)
Рис.1.6. а) Радиолокационное изображение береговой линии; б) план участка этой береговой линии
1.2.1.Виды ориентации
Любая РЛС позволяет измерять дальности до объектов и их угловые координаты. В судовых НРЛС такими координатами являются курсовые углы (КУ) или пеленги.
Радиокурсовым углом (РКУ), определяемым на экране РЛС, называется угол, заключенный между отметкой линии курса и направлением на объект. РКУ отсчитывается от отметки линии курса, находящейся в диаметральной плоскости судна, и имеет значения 0ο -180° левого или правогоборта.
Рис.1.7. Определение РКУ и РПУ
Направление на объект (см.рис.1.7) также можно определять с
помощью радиолокационного пеленга (РЛП) представляющего собой угол между плоскостью географического меридиана и направлением на объект Пеленг отсчитывается по часовой стрелке от направления на
Север (в пределах 360°), которое выводится на индикатор НРЛС от
гирокомпаса. |
|
Измерение угловых координат основано на |
использовании |
направленных свойств антенны РЛС в горизонтальной плоскости, т. е. угол между линией курса и осью диаграммы излучения антенны, направленной на объект, будет курсовым углом (РКУ), а угол между направлениями на Север и на объект – пеленгом (радиолокационным пеленгомРЛП).
Внастоящее время в судовых НРЛС используется три вида ориентации – относительно диаметральной плоскости судна, т.н. ориентация по «КУРСУ», ориентация относительно Севера, т.н. ориентация по «СЕВЕРУ» («НОРДУ») и ориентация «КУРС СТАБИЛИЗИРОВАННЫЙ».
Впоследних двух случаях НРЛС обязательно должна быть сопряжена с гирокомпасом.
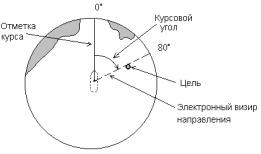
При ориентации по «КУРСУ» (см. рис.1.8) отсчет углового положения антенны осуществляется относительно диаметрали судна
Рис.1.8.Пример радиолокационного изображения при ориентации по «Курсу»
и азимутальное направление на цель определяется курсовым углом.
Отметка курса направлена вверх и находится на нуле отсчета неподвижной шкалы.
Визир направлен на цель, находящуюся на курсовом угле, например, 80° правого борта. При изменении курса судна происходит смещение всего изображения. Отметка курса при этом остается неподвижной. Навигационное изображение на ЭЛТ при такой ориентации может быть смазанным из-за рыскания судна во время
его движения, в то время как метка курса остается неподвижной. (Разновидностью ориентации по «КУРСУ» является ориентация «КУРС СТАБИЛИЗИРОВАННЫЙ»).
С введением в индикатор данных от гирокомпаса можно сохранить такое положение изображения, при котором северная часть компасного меридиана для изображаемой на экране области пространства будет находиться на одном и том же направлении при
любом изменении курса судна. |
|
Этот режим ориентации |
изображения называется |
стабилизацией относительно Севера или ориентацией по «СЕВЕРУ». В данном случае (см. рис.1.9) мнимая линия северной части компасного меридиана всегда будет направлена вверх.
Изображение не будет смещаться при изменении курса судна. Изменять свое положение будет только линия отметки курса, направление которой соответствует курсу судна. Величина этого изменения зависит от угла поворота судна. В этом случае отсчет углового положения антенны НРЛС осуществляется относительно истинного меридиана («СЕВЕРА») и угловое положение цели определяется пеленгом.
Рис.1.9. Пример радиолокационного изображения при
ориентации по «Северу» |
|
|
|
Изображение |
ориентировано |
и |
стабилизировано |
относительно |
|
|
|
Севера. По неподвижной |
шкале отметка |
курса |
показывает курс |
судна, например, 184°. Визир направлен на ту же цель. Тогда по неподвижной шкале отсчитывается радиолокационный пеленг 264°.
При изменении курса судна изображение остается неподвижным, меняет положение только отметка курса судна.