

Например, для неподвижного потребителя при отсутствии организованных помех среднеквадратическая погрешность измерения псевдодальности составляет около 30 м, в то время как при тех же условиях аппаратура первого и второго класса позволяет получить погрешность не более 5 м.
3.2. Точностные характеристики системы GPS
Известно, что существующая система GPS постоянно совершенствуется, в частности – в отношении сервиса, предоставляемого системой GPS сообществу ее пользователей, как гражданских, так и военных.
До мая 2000 года точность определения координат гражданских пользователей с использованием С/А - кода была относительно низкой – 40-100 метров, так как этот код сознательно загрублялся так называемым режимом избирательного доступа SA
(Selective Availability).
Это был специально созданный режим работы КА системы GPS только для режима SPS - С/А - кода для всех гражданских потребителей, когда значительно ухудшается точность измерения навигационного параметра псевдодальности в системе L1 на частоте f1 =1575,42 МГц. В этом режиме фактически смещалась шкала времени подачи сигнала с КА.
Это преднамеренное ухудшение точности работы было задумано с целью "не дать возможному противнику воспользоваться точностью GPS с тактическими целями" (инициатива руководства ВС США). Позже, в процессе модернизации системы произошли изменения, когда в полночь на 1 мая 2000 года согласно директиве Президента Клинтона этот режим был отключен [18,27].
На рис. 3.7 показан пример, как изменились ошибки в определении места, после исключении режима SA.
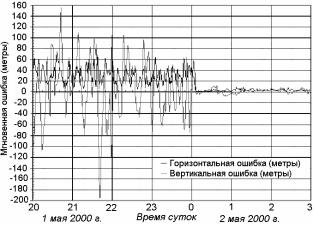
Рис.3.7. Характер изменения ошибок после отключения SA
Измерения проводились с 1-го на 2-е мая 2000 года в Колорадо Спрингс (США).
С тех пор, как режим избирательного доступа был отключен, пользователи GPS постоянно получают горизонтальную точность в SPS лучше 10 метров.
Без всяких дополнительных пользовательских затрат на оборудование, отключение режима избирательного доступа дало пользователям GPS во всем мире значительные преимущества в реализации широкого круга их задач.
Точностные характеристики определения места, скорости движения и времени подвижного объекта с помощью GPS (работающего не в дифференциальном режиме) определяются источниками погрешностей и соответствующими статистическими характеристиками.
В табл.3.2. согласно [9], приведены СКО основных источников ошибок определения псевдодальности. при типичном геометрическом факторе HDOP, равном 2.
Таблица 3.2. СКО основных ошибок определения псевдодальности, м
Источники ошибок |
С/А-код |
Р-код |
|
|
|
Ионосфера |
7 |
0.01** |
|
|
|
Тропосфера |
0,7 |
0,7 |
|
|
|
Многолучевость |
1,2 |
1,8 |
|
|
|
Шумы приемника |
1,5 |
0,6 |
|
|
|
Погрешности координатно- |
3,6 |
3,6 |
временного обеспечения НКА |
|
|
Общая |
8,1 |
4,1 |
|
|
|