

14.8. Микропроцессорная защита электроустановок
Рассмотренные устройства защиты, выполненные на базе электромеханических реле или с использованием полупроводниковых элементов и аналоговых интегральных микросхем, имели различные технические реализации.
456 Глава 14. Релейная защита в системе электроснабжения предприятия
Особенность их — жесткая логика первой научной картины мира. И хотя они еще долго будут находить применение, особенно для алгоритмов простых повреждений, несомненно их вытеснение новым поколением защит с цифровой обработкой информации. Их отличает высокий уровень унификации элементов, гибкость, возможность реализации сложных алгоритмов выявления повреждений, развитая система функционального контроля, уменьшение расходов на обслуживание.
Выделяют основные принципы микропроцессорной системы защиты с цифровой обработкой информации: неявное резервирование, унификацию, модульность, функциональную децентрализацию, специализацию обработки информации, единство информационной базы, комплектность, гибкость. Возникновение неисправностей в аппаратной и программной частях предотвращаются путем перераспределения задач между элементами системы в полном объеме или с потерей некоторых второстепенных функций. Вероятность отказа системы в целом снижается.
Информационное обеспечение системы основано на параметрах входных сигналов: амплитуды, фазовые сдвиги и частота, а также их интегральные значения. Помехи, вызванные переходными процессами и сопровождающиеся появлением апериодических и гармонических составляющих, обусловливают погрешности, снижаемые предварительной фильтрацией входных токов и напряжений. В результате синусоидальный сигнал содержит информацию об основной гармонике входной величины. Наиболее широко используется цифровая обработка отсчетов мгновенных значений синусоидальных сигналов и их ортогональных составляющих.
Амплитуду Um и фазу ф сигнала известной частоты со0 можно вычислить по отсчетам ип и «„_,, зафиксированным через шаг At (при со = со0 от At не зависят Um и ф, а потому определяются без дополнительных погрешностей):
•уип-2м„м„_.costu,Af+^_. и sincOhA/
tfm= — п—^ — —; ф = ап^ "- ^ . (14.41)
sin 00^ uncos(o0At-un_l
Для определения [/миф можно использовать отсчеты мгновенных значений сигнала ип и их производных и'п:
ит
и\ +
V*
Чюоу
1/2
9 = arctg^L. (14.42)
В этом случае вычисление производной осуществляется по двум или трем системам отсчета синусоидальности. Дополнительная погрешность в определении Un — пульсации измеренных значений: более 5 % при А/ > 0,001 с и 1,5-2% при Д/< 0,0008 с.
В цифровых системах применяют определение амплитуд и фаз синусоидальных сигналов с использованием ортогональных составляющих, для полу-
14.8. Микропроцессорная защита электроустановок
457
чения которых используют метод Фурье и его модификации. Метод обеспечивает полное подавление во входном сигнале постоянной составляющей и гармоник с частотами, кратными оо0 при заданном At.
Принципиальную возможность для определения информационных параметров входных сигналов обеспечивает времяимпульсный метод, основанный на замене синусоидального процесса последовательностью импульсов прямоугольной формы. Их длительности содержат информацию об амплитудах, частоте и фазовых сдвигах сигналов.
Формирование ортогональных составляющих входных сигналов в измерительных органах микропроцессорных защит обеспечивается в аналоговом, цифровом или смешанном видах с помощью формирователей. Аналоговые, усложняющие эту часть и не исключающие фазочастотные погрешности преобразования, используют активные фазоповоротные элементы с фазочастот-ными характеристиками, смещенными на угол я/2. При цифровой обработке ортогональные составляющие, если сигнал синусоидальный, могут быть получены по его мгновенным значениям, зафиксированным с интервалом 7/4, где Т — период сигнала.
Более высокое быстродействие имеет метод определения составляющих по двум отсчетам мгновенных значений сигналов ипЛ и ип, зафиксированных через шаг At.
"„ = ^,nsin\|/„; «„-! = Umnsin(y„- со0At), (14.43)
где Umn и ц/л — соответственно амплитуда и фаза синусоидального сигнала в момент времени tn; co0 — основная угловая частота.
С учетом того, что um = «,„„sin vj/n — синусная и исп = «„,„cos l|/n — косинусная ортогональные составляющие для tn, получим
ы„ cos юп Д/- и„ _,
usn
=
«„;
»сп
= ■
° ., '- (14.44)
sinq, At
При заданных со0 и At (определяющие быстродействие), величины cosco0A/ и sin со0Д/ постоянны. Для этого же случая usn можно определить как среднее, а исп — как первое приближение производной:
«„= '
";
"с= '
• (14.45)
2 CfljjA?
В основу построения формирователей ортогональной составляющей может быть положен подход, приводящий к алгоритму Фурье, дающему нерекурсивную реализацию
"„*(>) = Чехр[- Н +1.ит sin(way + cpm), (|4 46)
458 Глава 14. Релейная защита в системе электроснабжения предприятия
где Ua — амплитуда апериодической составляющей; т — ее постоянная времени затухания; М — порядок наивысшей гармоники входного сигнала; Um — амплитуда и фт — начальная фаза т-й гармоники.
Первоначально сигнал Um(t) обрабатывается аналоговым фильтром низких частот, где наиболее приемлемы активные звенья второго порядка с многопетлевой обратной связью, содержащей два RC — элемента. Если считать, что такой фильтр полностью пропустит апериодическую составляющую и задержит высшие гармоники с порядком т > N, то сигнал на его входе будет
и, = £4ехр|--
и
+ IL;sinv|/m, (14.47)
m=l
где уя= m(u0t + <рт — текущая фаза m-й гармоники.
Сигнал u(t) обрабатывается цифровыми фильтрами, обеспечивающими формирование ортогональных составляющих.
Определение информационных параметров входных сигналов (вторичные токи и напряжения) в измерительных органах микропроцессорных защит на основе цифровой обработки отсчетов мгновенных значений, позволяет выяснить величины, называемые контролируемыми. Одной из основных задач на этапе разработки системы защиты является выбор шага дискретизации Д/ входных сигналов. Теоретическим обоснованием выбора служит теорема Ко-тельникова
At<(2fpr\ (14.48)
Если и — фактическое значение сигнала, и~ — приближенное значение выходного после предварительной аналоговой обработки и аналого-цифрового преобразования, то при относительной ошибке Ъиа
u=-^-±0,5-2-"Usx, (14.49)
где п — количество разрядов аналого-цифрового преобразователя без учета знакового.
Минимальная разность смежных дискретных значений сигнала с учетом действия ошибок по уровню а (рис. 14.21, а)
-Zjr- -0,5-2- U„x--±f- -0,5- 2-и, 1 + о„„ 1 - о,,,,
>а. (14.50)
Минимальная разность имеет место в области экстремума функций (14.21, б). Окончательно
14.8. Микропроцессорная защита электроустановок
459
|
|
|
|
|
|
|
|
|
г-* ' |
|
"" |
|
|
|
|
|
-е |
||||
и |
|
|
|
|
|
|
_Е«- |
|||
|
|
|
|
|
|
i |
||||
|
|
|
|
U(t) |
|
|
|
|||
а |
1 |
|
|
" |
|
|
|
|||
й"„ |
-1 |
|
/ ' |
|
|
г,. |
|
|||
|
|
|
|
, |
|
|
|
|||
' " i |
|
|
Чо |
|
|
|
|
|
||
|
|
|
, |
|
|
|
|
|||
0 |
|
|
М |
|
|
', с |
||||
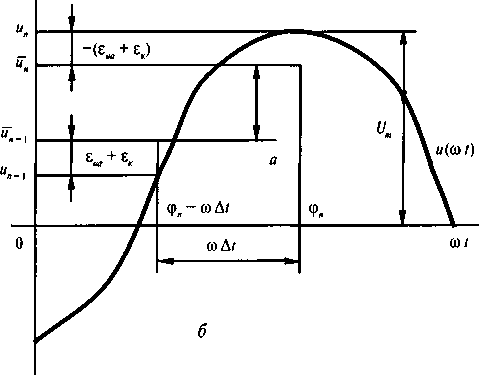 Рис.
14.21. К выбору минимальной разности
смежных дискретных значений сигнала:
еца
= (е„ + Еа)
— результирующая абсолютная ошибка
£„ = [и
- и) — абсолютная
ошибка предварительной
обработки сигнала]; sa
—
аналоговая
ошибка; ек
—
ошибка квантования сигнала
Рис.
14.21. К выбору минимальной разности
смежных дискретных значений сигнала:
еца
= (е„ + Еа)
— результирующая абсолютная ошибка
£„ = [и
- и) — абсолютная
ошибка предварительной
обработки сигнала]; sa
—
аналоговая
ошибка; ек
—
ошибка квантования сигнала
At > — arccos со
1-8,
1 + 5„.
-2l-k<X-&j
(14.51)
где k = U„/Um.
Зависимости минимального шага дискретизации синусоидального сигнала частотой 50 Гц от разрядности, получаемые по (14.51), приведены на рис. 14.22: минимальное значение At в значительной степени определяется кратностью к и разрядностью п.
Определение амплитуды для момента времени tn может быть произведено по мгновенным значениям синусной usn и косинусной исп ортогональных составляющих сигнала:
т
460