

- •Москва «Интермет Инжиниринг»
- •Глава 1. Электрическое хозяйство потребителей 15
- •Глава 2. Уровни (ступени) системы электроснабжения s3
- •Глава 3. Потребление электроэнергии и электрические нагрузки 97
- •Предисловие
- •Введение
- •Глава 1. Электрическое хозяйство потребителей
- •1.1. Электрика в системе электрических наук и практической деятельности
- •16 Глава 1. Электрическое хозяйство потребителей
- •18 Глава 1. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •Глава I. Электрическое хозяйство потребителей
- •1.2. Основы мировоззрения электриков электрики
- •Глава 1. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •1.3. Термины и определения электрики
- •Глава 1. Электрическое хозяйство потребителей
- •Глава I. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •1.4. Промышленное электропотребление и количественное описание электрического хозяйства
- •Глава 1 Электрическое хозяйство потребителей
- •Глава I. Электрическое хозяйство потребителей
- •Глава 1 Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •Глава 1. Электрическое хозяйство потребителей
- •Глава 2. Уровни (ступени) системы электроснабжения
- •2.1. Потребители электрической энергии Группы потребителей
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Зн нейтрали
- •2.1. Потребители электрической энергии
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2 Уровни (ступени) системы электроснабжения
- •2.2. Основные требования к системам электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2 Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •2.3. Ценологические ограничения построения и функционирования электрического хозяйства
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 2. Уровни (ступени) системы электроснабжения
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •3.1. Характерные электроприемники
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3 Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •3.2. Параметры электропотребления и расчетные коэффициенты
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3 Потребление электроэнергии и электрические нагрузки
- •3.3. Формализуемые методы расчета электрических нагрузок
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •3.4. Определение электрических нагрузок комплексным методом
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •3.5. Практика определения расчетного и договорного максимума
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 3. Потребление электроэнергии и электрические нагрузки
- •Глава 4. Выбор схем, напряжений и режимов присоединения предприятии
- •Глава 4. Выбор схем, напряжений и режимов присоединения промышленных предприятий к субъектам электроэнергетики
- •4.1. Схемы присоединения и выбор питающих напряжений
- •4.2. Источники питания потребителей и построение схемы электроснабжения
- •4.3. Надежность электроснабжения потребителей
- •4.4. Выбор места расположения источников питания
- •Глава 4. Выбор схем, напряжений и режимов присоединения предприятий
- •Глава 5. Схемы и конструктивное исполнение главных понизительных и распределительных подстанций
- •5.1. Исходные данные и выбор схемы гпп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •5.2. Выбор и использование силовых трансформаторов
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и /77
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •5.3. Схемы блочных подстанций пятого уровня
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •5.4. Схемы специфических подстанций
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •5.5. Компоновки открытых и закрытых распределительных устройств (подстанций)
- •In к трансфор-т матору
- •Глава 5. Схемы и конструктивное исполнение гпп и рп
- •Глава 6. Энергосберегающая энергетическая электроника в системах электроснабжения
- •6.1. Классификация устройств энергетической электроники
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •6.3. Устройства с однократным преобразованием частоты
- •Глава 6 Энергосберегающая энергетическая эаектроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •Выпрямители
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника Зависимые инверторы
- •Автономные инверторы
- •Непосредственные преобразователи частоты
- •6.4. Устройства с двукратным (и более) преобразованием частоты
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 6. Энергосберегающая энергетическая электроника
- •Глава 7. Схемы электроснабжения в сетях напряжением до 1 кВ переменного и до 1,5 кВ постоянного тока
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •7.2. Выбор трансформаторов для цеховых подстанций
- •Глава 7. Схемы электроснабжения в сетях
- •7.3. Размещение и компоновка подстанций зур
- •Глава 7 Схемы электроснабжения в сетях
- •Глава 7 Схемы электроснабжения в сетях
- •Глава 7 Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •7.4.Распределительные устройства 2ур
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7 Схемы электроснабжения в сетях
- •7.5. Преобразовательные установки и подстанции
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 7. Схемы электроснабжения в сетях
- •Глава 8. Транспорт (канализация) электрической энергии
- •8.1. Общие сведения о способах передачи и распределения электроэнергии
- •8.2. Воздушные линии электропередач
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •8.3. Кабельные линии
- •8.4. Прокладка кабелей в траншеях
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8 Транспорт (канализация) электрической энергии
- •8.5. Прокладка кабелей в блоках
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8 Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •8.7. Токопроводы
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 8. Транспорт (канализация) электрической энергии
- •Глава 9. Расчет токов короткого замыкания
- •Глава 9. Расчет токов короткого замыкания
- •9.1. Короткое замыкание в симметричной трехфазной цепи промышленного предприятия
- •Глава 9. Расчет токов короткого замыкания
- •Глава 9. Расчет токов короткого замыкания
- •9.2. Определение значений токов короткого замыкания в электроустановках выше 1 кВ
- •1500 И выше 40-80
- •Глава 9. Расчет токов короткого замыкания
- •Глава 9. Расчет токов короткого замыкания
- •Глава 9. Расчет токов короткого замыкания
- •Глава 9. Расчет токов короткого замыкания
- •Глава 10. Выбор аппаратов и токоведущих устройств в электротехнических установках
- •10.1. Выбор аппаратов по номинальным параметрам
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •10.2. Выбор высоковольтных выключателей (ячеек)
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •10.4. Выбор выключателей нагрузки и предохранителей
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •10.5. Выбор реакторов
- •10.6. Выбор трансформаторов тока и трансформаторов напряжения
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •10.7. Проверка токоведущих устройств на термическую и динамическую стойкость
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •Глава 10. Выбор аппаратов и токоведущих устройств
- •Глава 11. Пуск и самозапуск электрических двигателей
- •11.1. Общая характеристика асинхронных электродвигателей с короткозамкнутым ротором и синхронных двигателей
- •Глава 11. Пуск и самозапуск электрических двигателей
- •Глава 11. Пуск и самозапуск электрических двигателей
- •Глава 11. Пуск и самозапуск электрических двигателей
- •11.2. Пуск и самозапуск асинхронных и синхронных двигателей Асинхронные двигатели
- •Глава 11. Пуск и самозапуск электрических двигателей
- •Синхронные двигатели
- •Глава 11. Пуск и самозапуск электрических двигателей
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •12.1. Нормы качества электрической энергии и область их применения в системах электроснабжения
- •Глава 12. Качество электрической энергии
- •12.2. Отклонения и колебания напряжения Отклонения напряжения
- •Глава 12. Качество электрической энергии Колебания напряжения
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •12.3. Несинусоидальность и несимметрия напряжения Несинусоидальность напряжения
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Несимметрия напряжений
- •Глава 12. Качество электрической энергии
- •12.4. Отклонения частоты, провал и импульс напряжения. Временное перенапряжение Отклонение частоты напряжения
- •Провал напряжения
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Временное перенапряжение
- •12.5. Причины и источники нарушения показателей качества электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 12. Качество электрической энергии
- •Глава 13. Компенсация реактивной мощности
- •13.1 Баланс активных и реактивных мощностей
- •Глава 13. Компенсация реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •13.2. Основные потребители реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •13.3. Компенсирующие устройства
- •Глава 13. Компенсация реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •13.4. Выбор мощности компенсирующих устройств
- •Глава 13. Компенсация реактивной мощности
- •Глава 13. Компенсация реактивной мощности
- •Глава 14. Релейная защита в системе электроснабжения промышленного предприятия
- •14.1. Назначение, требования и принципы релейной зашиты
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •14.3. Релейная защита двигателей напряжением выше 1 кВ
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •14.4. Релейная защита трансформаторов зур
- •14.5. Релейная защита кабельных линий
- •14.5. Релейная защита кабельных линий
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •14.6. Релейная защита двигателей напряжением до 1 кВ
- •14.7. Автоматический ввод резерва
- •14.8. Микропроцессорная защита электроустановок
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 14. Релейная защита в системе электроснабжения предприятия
- •Глава 15. Установки наружного и внутреннего освещения
- •15.1. Системы и виды освещения
- •Глава 15. Установки наружного и внутреннего освещения
- •15.2. Нормирование и устройство освещения
- •Глава 15. Установки наружного и внутреннего освещения
- •Глава 15. Установки наружного и внутреннего освещения
- •15.3. Расчет осветительной установки
- •Глава 15. Установки наружного и внутреннего освещения
- •15.4. Электроснабжение осветительных установок
- •Глава 15. Установки наружного и внутреннего освещения
- •Глава 15. Установки наружного и внутреннего освещения
- •Глава 16. Защитные меры электробезопасности и заземление
- •16.1. Классификация электротехнических установок относительно мер электробезопасности
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •16.2. Заземляющие устройства Общие сведения
- •Расчет заземляющих устройств
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •16.3. Расчет молниезащитных устройств зданий и сооружений
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 16. Защитные меры электробезопасности и заземление
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •17.1. Потребитель и электроснабжающая организация
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •17.2. Нормы расхода электроэнергии по уровням производства Виды, структура и состав норм
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •17.3. Прогнозирование электропотребления Методы прогнозирования электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •17.4. Ценологическое влияние на электропотребление предприятий
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 17. Организация электропотребления
- •Глава 18. Энергосбережение на промышленных предприятиях
- •18.1. Основные направления энергосбережения
- •Глава 18. Энергосбережение на промышленных предприятиях
- •Глава 18. Энергосбережение на промышленных предприятиях
- •18.2. Принципы и этапы внедрения системы энергоменеджмента
- •Глава 18. Энергосбережение на промышленных предприятиях
- •18.3. Энергетические балансы
- •60 КВтч/т (10 %)
- •60 КВтч/т (25 %)
- •Глава 18. Энергосбережение на промышленных предприятиях
- •18.4. Комплексный подход к сокращению электропотребления
- •18.5. Совершенствование работы общепромышленных систем и оборудования
- •Глава 18. Энергосбережение на промышленных предприятиях
- •Глава 18. Энергосбережение на промышленных предприятиях
- •Глава 18. Энергосбережение на промышленных предприятиях
- •Глава 18. Энергосбережение на промышленных предприятиях
- •18.6. Повышение эффективности электросбережения многоотраслевых технологических процессов и оборудования
- •Глава is. Энергосбережение на промышленных предприятиях
- •18.7. Потери электроэнергии в электрических сетях
- •Глава 18. Энергосбережение на промышленных предприятиях
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •19.2. Этапы и стадии проектирования
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •19.3. Проектирование объектов строительства
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •19.4. Электрическая часть проектирования
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 19. Инвестиционное проектирование объектов электрики
- •Глава 20. Рекомендации по оценке эффективности инвестиционных проектов
- •20.1. Общественная и коммерческая эффективность
- •Глава 20. Рекомендации по оценке эффективности ил
- •Глава 20. Рекомендации по оценке эффективности ип
- •Глава 20. Рекомендации по оценке эффективности ип
- •20.2. Денежные потоки и показатели эффективности инвестиционных проектов
- •Глава 20. Рекомендации по оценке эффективности ип
- •20.3. Расчет показателей общественной и коммерческой эффективности
- •Глава 20. Рекомендации по оценке эффективности ип
- •Глава 20. Рекомендации по оценив эффективности ип
- •20.4. Локальные технико-экономические расчеты в электрике
- •Глава 20. Рекомендации по оценке эффективности ип
- •Глава 20. Рекомендации по оценке эффективности ип
- •Глава 20. Рекомендации по оценке эффективности ип
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: организация управления электрическим хозяйством
- •21.1. Структурная перестройка менеджмента электрики
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.2. Принципы организации управления системами электрики
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.3. Организация эксплуатации и ремонта системы электроснабжения
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.4. Организация электроремонта силового электрооборудования
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.5. Центральная электротехническая лаборатория
- •Глава 21 Менеджмент электрики орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.6. Определение численности электротехнического персонала
- •Глава 21. Менеджмент электрики: орнанизация управления
- •21.7. Оптимизация структуры установленного и ремонтируемого оборудования систем электрики
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
- •Глава 21. Менеджмент электрики: орнанизация управления
Глава 11. Пуск и самозапуск электрических двигателей
ный момент на валу Мэ, равный в установившемся режиме моменту сопротивления механизма Ммех.
Параметры схемы замещения и режима принято представлять в относительных единицах. За базисные единицы принимают номинальную полную мощность 5Н0М, номинальное напряжение UH0U, номинальный ток статорной обмотки
1ном ном ' ном'
(11.2)
Электромагнитный момент выражают в долях номинального момента Л/ном. Основные параметры режима АД могут быть представлены через параметры схемы замещения, скольжение и напряжение на выводах по соотношениям:
P=U2Re
1
Z(s)
; (п.З) Q = u2im
l
Z(s)
; (П.4) h = U
l
Z{s)
(11.5)
где Z(s) — сопряженное входное комплексное сопротивление; Z(s) — входное комплексное сопротивление АД при скольжении ротора 5. В соответствии со схемой замещения
Z(s)=Rl + jXgl +
[jxl2 Ш+М))
(п.6)
Зависимости основных параметров режима АД от скольжения при номинальном напряжении называются пусковыми характеристиками.
На величину входного сопротивления Z(s) существенно влияет изменение сопротивлений R2 и Ха2 обмотки ротора, вызванное эффектом вытеснения тока, степень которого определяется частотой наводимых в обмотке токов, т. е. скольжением s.
Эффект вытеснения тока в обмотках ротора приводит к уменьшению ак-
ЛгЮ
Х2„-Ю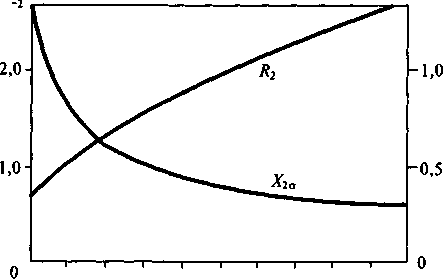 0,1
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 s
0,1
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 s
Рис. 11.2. Зависимость параметров обмотки ротора АД (А-13-62-10) от скольжения
11.1. Общая характеристика асинхронных и синхронных двигателей
361
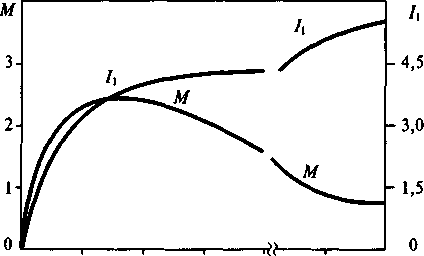
Junu n m< пл< п тс
п < Л
Рис. 11.3. Пусковые характеристики АТД-5000 (/, — ток статора; М — электромагнитный момент; sa — ось скольжения)
тивного сопротивления R2 и увеличению индуктивного сопротивления рассеяния Ха1 (рис. 11.2) в процессе разгона АД, что проявляется в возрастании величины тока статора в начальный период пуска (s = 1) за счет реактивной составляющей и уменьшении электромагнитного момента (рис. 11.3).
Для асинхронного двигателя характерны следующие каталожные данные: номинальная мощность на валу Рнои, кВт; номинальное межфазное напряжение обмотки статора £/ном, кВ; номинальный КПД Т)ном; номинальный коэффициент мощности cos фном; скольжение в номинальном режиме sH0M; кратность пускового тока I*-I„/IiHOM', кратности пускового М* = Л/п/Л/ном и максимального М*ах = Мта/Мнои электромагнитных моментов.
Синхронные двигатели
Применение синхронных двигателей (СД) в промышленности обусловлено следующими их функциональными особенностями: они могут быть приводом для механизмов с синхронной частотой вращения в нормальных установившихся режимах и служить управляемым источником реактивной мощности в результате регулирования тока в обмотке возбуждения (ОВ).
Из-за несимметрии ротора (обмотка возбуждения располагается только по продольной оси) схемы замещения СД по продольной d (рис. 11.4, б) и поперечной q (рис. 11.4, в) осям различаются.
Параметры схемы замещения: Лст, Rf, Ru, Rlg — соответственно активные сопротивления статорной обмотки, обмотки возбуждения и демпферных обмоток по продольной и поперечной осям ротора; Xid и X — сопротивления взаимоиндукции между статорными и роторными обмотками по осям d и q; ^о' ^ар Xai<i> Xa\q — индуктивные сопротивления рассеяния статорной обмотки, обмотки возбуждения и демпферных обмоток по осям d и q.
Эквивалентное активное сопротивление Rf3 обмотки возбуждения определяется ее режимом:
— при пуске у невозбужденного СД, когда ОВ замкнута на дополнительное пусковое сопротивление Rn (рис. 11.4, а),
R„ = Rf+Kn;
(11.7)
362