

Рекомендации по моделированию дифференцирующего звена с замедлением и изодромного звена
При моделировании переходных и импульсных
характеристик с помощью скрипт-языка
в среде SciLabвозможны
трудности в виде некорректного расчета
и представления результатов моделирования.
Для корректного моделирования необходимо
изменить передаточные функции реального
дифференцирующего звена и изодромного
звена. Передаточная функция реального
дифференцирующего звена с замедлением
может быть представлена следующим
образом:![]() ,
гдеe– малая величина
(примем ее равной 10–10).
,
гдеe– малая величина
(примем ее равной 10–10).
Скрипт для моделирования переходной характеристики дифференцирующего звена с замедлением:
num = 1D-10;
K = 2; T = 0.1;
W = syslin('c', (K*%s+num)/(num*%s^2+T*%s+1));
t = 0:0.001:1;
y = csim('step', t, W);
plot(t, y); xgrid(1);
xtitle('h(t)', 'time, c', 'h(t)');
Результат работы скрипта представлен на рис. 8.
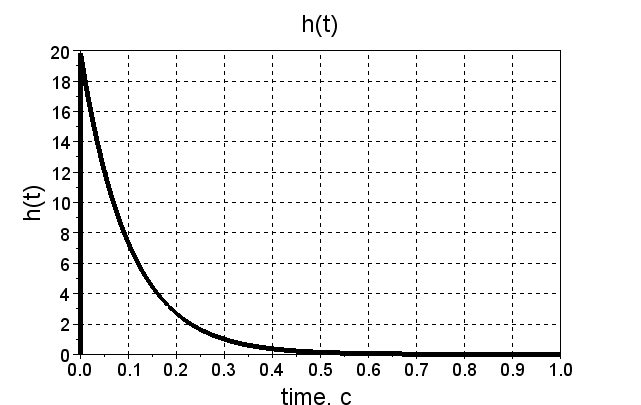
Рис. 8. Переходная характеристика дифференцирующего звена с замедлением
Для изодромного звена передаточная
функция должна быть изменена следующим
образом:
![]() .
.
Скрипт для моделирования переходной характеристики изодромного звена:
num= 1D-10;
K= 1;T= 2;
W=syslin('c',K*(T*%s+1)/(num*%s^2 +%s));
t = 0:0.001:1;
y = csim('step', t, W);
plot(t, y); xgrid(1);
xtitle('h(t)', 'time, c', 'h(t)');
Результат работы скрипта представлен на рис. 9.
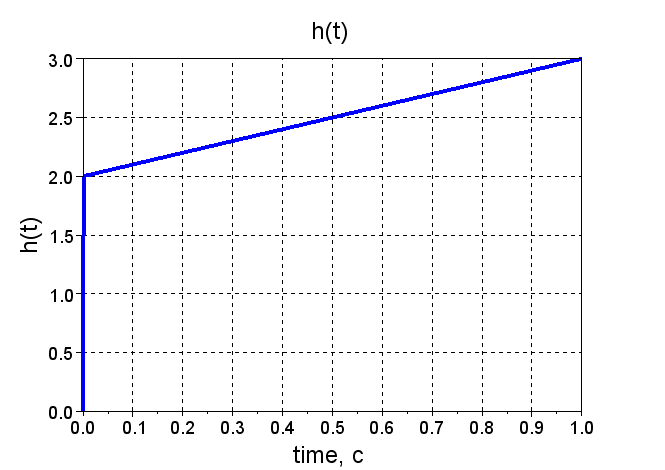
Рис. 9. Переходная характеристика изодромного звена
Использование средств визуального моделирования
Для снятия временных характеристик используется типовая схема, состоящая из блока задания постоянного сигнала 1 (блок CONST_m), блока передаточной функции (CLR– Continuous transfer function) и приемника сигнала (блокиCSCOPEиCLOCK_c), приведенная на рис.10.
Рассмотрим основные свойства блока передаточной функции Continuous transfer function. При задании параметров передаточной функции необходимо в окне задания свойств ввести полиномы числителя и знаменателя ПФ (см. рис. 11).
Введенные полиномы не должны содержать операций, сопряженных с дополнительными вычислениями (открытие скобок и др.). Например, на рис. 11 приведен пример задания апериодического звена с коэффициентом и постоянной времени, равными единице. Более подробно работа со средствами визуального моделирования рассмотрена далее.
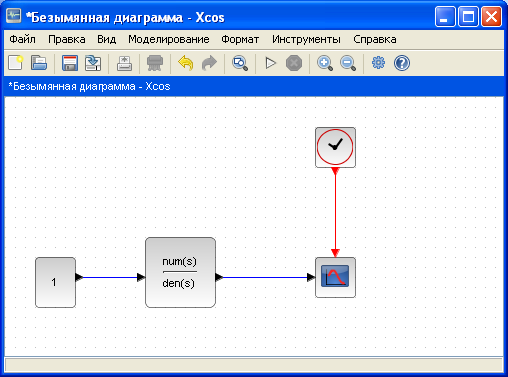
Рис. 10. Снятие временных характеристик ПФ в Xcos
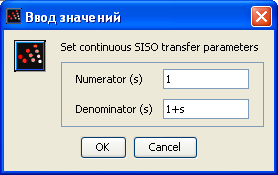
Рис. 11. Ввод значений блока ПФ
Практическая работа
Цель работы: теоретическое и практическое исследование переходных и импульсных функций типовых динамических звеньев.
Работа включает в себя следующие этапы:
вывод передаточной функции по известному дифференциальному уравнению системы;
изучение типовых динамических звеньев и их временных характеристик (в том числе различных методик получения характеристик);
построение моделей типовых динамических звеньев в средах моделирования MatLab (SciLab) с использованием средств визуального моделирования и скриптовых языков, а также получение временных характеристик ТДЗ согласно заданию;
исследование взаимосвязей между параметрами типовых динамических звеньев и их временными характеристиками.
В процессе выполнения практической работы студент (курсант) обязан:
Выбрать дифференциальное уравнение системы из табл. 5 согласно варианту задания и вывести передаточную функцию системы.
Выбрать задание к лабораторной работе в соответствии с вариантом задания из табл. 6.
В теоретической части работы для указанных вариантов в задании звеньев по передаточной функции, используя преобразование Лапласа, вывести выражения для переходных и импульсных характеристик. Теоретически рассчитать импульсные и переходные характеристики указанных в задании переходных функций при заданных в задании параметрах и заданном временном интервале.
В практической части работы собрать схемы для моделирования переходных и импульсных характеристик в среде визуального моделирования (Simulink или Xcos). Промоделировать ТДЗ и получить переходные характеристики при указанных в задании параметрах передаточных функций. Поместить полученные переходные характеристики в отчет по работе. Используя скриптовый язык, записать модули для создания указанных в задании передаточных функций. С помощью соответствующих функций получить переходные и импульсные характеристики для указанных в задании параметрах передаточных функций, поместить их в отчет по работе. Используя переходные временные характеристики, рассчитать показатели качества работы системы.
Проанализировать полученные результаты. Сделать вывод о влиянии параметров ТДЗ на переходные и импульсные характеристики.