

6.5. Критерий устойчивости Найквиста
Данный критерий применяется при анализе устойчивости систем, структурная схема которых показана на рис. 53. Здесь W(s)– передаточная функция разомкнутой САУ.
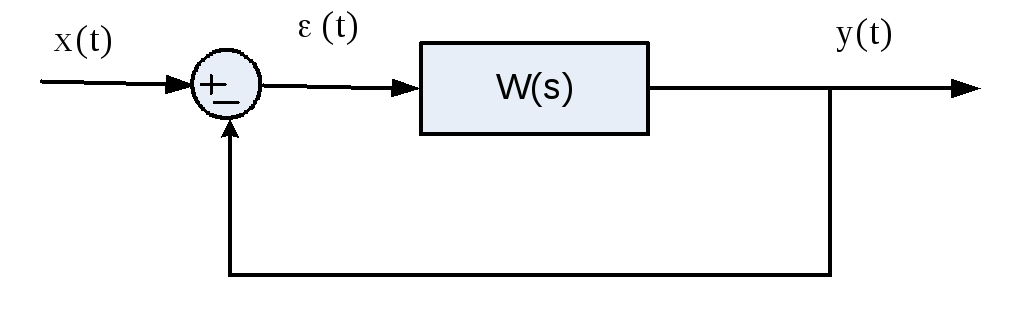
Рис. 53. Структура типовой САУ
Критерий формулируется следующим
образом. Предположим, что разомкнутая
система устойчива. Тогда для устойчивости
замкнутой САУ необходимо и достаточно,
чтобы годограф амплитудно-фазовой
характеристики
![]() разомкнутой системы (указанная
характеристика получается из
разомкнутой системы (указанная
характеристика получается из![]() заменой
заменой![]() )
не охватывал точку с координатами (–1,
j*0).
)
не охватывал точку с координатами (–1,
j*0).
Примечания:
Если корней в правой полуплоскости нет, то годограф W(j) не должен охватить точку (–1,j*0).
Неустойчивая система в разомкнутом состоянии может быть устойчивой в замкнутом состоянии. И наоборот.
Годограф W(j) для статических систем всегда начинается на оси реальных чисел. При порядке астатизма, равномr, по причине устремленияW(j) к(при0), видимая часть годографа появляется только в квадрантеr, отсчитанном по часовой стрелке.
Свойства годографа Найквиста:
Годограф Найквиста спиралевиден.
При годографW(j)0, т.к. не существует безынерционных систем.
Годограф статических САУ начинается из точки на вещественной оси.
Для положительных и отрицательных частот годографы зеркально симметричны относительно оси реальных чисел.
Частота, на которой
![]() называется частотой среза
называется частотой среза![]() .
Величина
.
Величина![]() называется запасом устойчивости по
фазе. Иногда вводят в рассмотрение запас
устойчивости по модулю (амплитуде)
называется запасом устойчивости по
фазе. Иногда вводят в рассмотрение запас
устойчивости по модулю (амплитуде)![]() :
:
![]() (37)
(37)
где частота
![]() определяется из соотношения
определяется из соотношения
![]() (38)
(38)
Из критерия Найквиста следует, что
устойчивая в разомкнутом состоянии
система будет устойчивой и в замкнутом
состоянии, если сдвиг по фазе на частоте
среза не достигает –![]() (–180°).
(–180°).
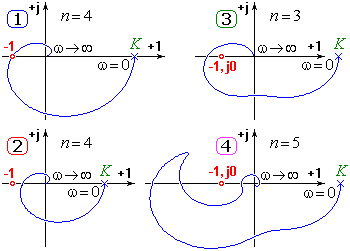
Рис. 54. Примеры годографов Найквиста статических САУ ([0...+)):
1 – САУ на колебательной границе устойчивости; 2 –устойчивая САУ (устойчива при любом уменьшении K); 3 – неустойчивая САУ; 4 – условно устойчивая САУ (только при изменении K в некотором диапазоне)
6.6. Логарифмический критерий
Логарифмический критерий – частотный критерий, позволяющий судить об устойчивости замкнутой САУ по виду логарифмической характеристики разомкнутой системы. Этот критерий основан на критерии устойчивости Найквиста.
Формулировка критерия: для устойчивости
системы в замкнутом состоянии необходимо
и достаточно, чтобы в диапазоне частот,
где ЛАЧХ разомкнутой системы
![]() больше нуля, число переходов фазовой
характеристики
больше нуля, число переходов фазовой
характеристики![]() прямой
прямой![]() снизу верх превышало на
снизу верх превышало на![]() число переходов сверху вниз, гдеа– число корней характеристического
уравнения разомкнутой системы, лежащих
в правой полуплоскости. Для минимально-фазовых
систем этот критерий формулируется
проще: в частоте среза системы (точке, где ЛАЧХ пересекает
ось абсцисс) значение фазы должно
превышать –1800: ((ср)
> –).
число переходов сверху вниз, гдеа– число корней характеристического
уравнения разомкнутой системы, лежащих
в правой полуплоскости. Для минимально-фазовых
систем этот критерий формулируется
проще: в частоте среза системы (точке, где ЛАЧХ пересекает
ось абсцисс) значение фазы должно
превышать –1800: ((ср)
> –).
Критическим значением коэффициента преобразования называется такое его значение, при котором АФЧХ проходит через точку (–1, j*0) и система находится на границе устойчивости.
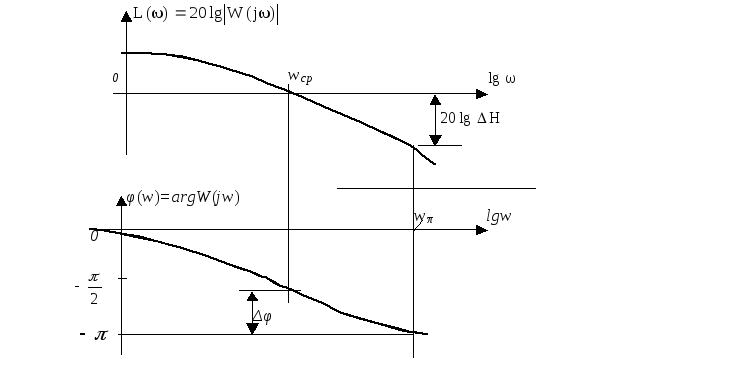
Рис. 55. Определение запасов устойчивостипо
логарифмическим характеристикам
Запасом по модулю называется величина в децибеллах, на которую нужно изменить коэффициент преобразования САУ, чтобы привести ее к границе устойчивости:
![]() ,
,
где
![]() —
частота, при которой фазовая характеристика
равна
—
частота, при которой фазовая характеристика
равна![]() .
.
Запасом устойчивости по фазе называется угол, на который нужно повернуть амплитудно-фазовую характеристику разомкнутой системы, чтобы замкнутая САУ оказалась на границе устойчивости:
![]() ,
,
где
![]() –
значение ФЧХ на частоте среза системы,
для которой выполняется условие
–
значение ФЧХ на частоте среза системы,
для которой выполняется условие![]() .
.
Методика определения запасов устойчивости по логарифмическим характеристикам приведена на рис. 55.
Рассмотрим пример применения критерия Найквиста. Возьмем систему, структурная схема которой приведена на рис. 50. Построим ЛАЧХ и ЛФЧХ разомкнутой системы с помощью SciLab (рис. 56):
s=poly(0,'s')
s =
s
-->sx=syslin('c',75/(0.004*s^3+0.41*s^2+s))
sx =
75
------------------
2 3
s + 0.41s + 0.004s
-->bode(sx)
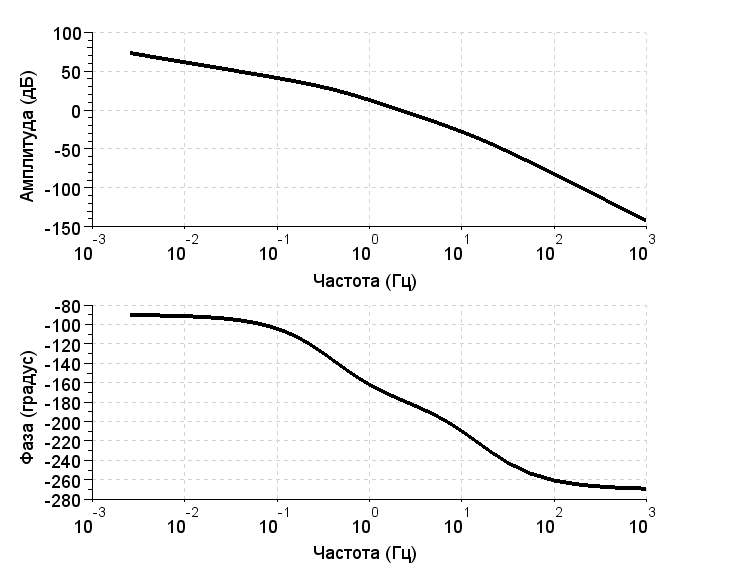
Рис. 56. ЛАЧХ и ЛФЧХ системы
Как нетрудно видеть из рис. 56, система устойчива ввиду того, что в частоте среза значение фазы превышает –180 градусов. Запас устойчивости по фазе равен примерно 5 градусов, по амплитуде – примерно 10 Дб.