

8.7. Практическая работа
Цель работы: приобретение навыков анализа и синтеза САУ. В процессе выполнения работы студент/курсант должен выполнить следующие пункты:
– определить характеристики исходной САУ;
– обеспечить точность (уменьшить статическую ошибку) САУ;
– выбрать значения параметров регулятора, обеспечивающих желаемые динамические свойства САУ;
– осуществить имитационное моделирование скорректированной САУ и рассчитать показатели качества системы.
Задание 1
Дана передаточная функция неизменяемой части системы вида
![]() . (55)
. (55)
Задающие воздействия, используемые в работе:
а) ступенчатое
![]()
б) линейно нарастающее![]() .
.
Параметры передаточной функции и задающих воздействий определяются в соответствии с задаваемым преподавателем вариантом работы (табл. 21).
В процессе выполнения первой части работы необходимо:
– путем моделирования исходной САУ
(рис. 67) получить графики
![]()
– сравнить полученное экспериментально значение статической ошибки с теоретическим, рассчитанным согласно (43);
– применяя описанные в теоретической
части работы способы статической
коррекции, обеспечить требуемую
статическую ошибку
![]() системы при отработке задающего
воздействия
системы при отработке задающего
воздействия![]()
– получить графики
![]() и
и![]() в скорректированной системе для
ступенчатого и линейно нарастающего
задающего сигнала.
в скорректированной системе для
ступенчатого и линейно нарастающего
задающего сигнала.
– сравнить время регулирования
![]() и перерегулирование
и перерегулирование![]() в исходной и скорректированной системах
при
в исходной и скорректированной системах
при![]() .
.
Задание 2
Передаточная функция неизменяемой части системы описывается передаточной функцией (55). Необходимо скорректировать систему введением интегрирующего звена в прямой канал (рис. 68), а также за счет охвата объекта управления местной неединичной положительной обратной связью (рис. 66).Передаточная функция интегрирующего звена, используемого в качестве регулятора имеет вид
![]()
Параметры регулятора и передаточной функции неизменяемой части системы необходимо выбрать из табл. 21. В качестве задающего воздействия использовать ступенчатый сигнал.
В процессе выполнения второй части работы необходимо:
– получить путем моделирования на ЭВМ
графики
![]() ,
,![]() в системе (рис. 68);
в системе (рис. 68);
– определить время регулирования
![]() и перерегулирование
и перерегулирование![]() ,
а также запасы устойчивости в исходной
системе;
,
а также запасы устойчивости в исходной
системе;
– применяя различные способы коррекции
динамических свойств САУ, найти
экспериментально (путем последовательного
перебора) значение
![]() ,
обеспечивающее в системе заданные
показатели качества (
,
обеспечивающее в системе заданные
показатели качества (![]() ,
,![]() )
и запасы устойчивости (при необходимости
увеличить коэффициент
)
и запасы устойчивости (при необходимости
увеличить коэффициент![]() );
);
– вывести выражения для передаточной функции разомкнутой и замкнутой системы при введении интегрирующего звена
– получить графики
![]() ,
,![]() ,
а также ЛАЧХ и ЛФЧХ разомкнутой системы
в скорректированной САУ.
,
а также ЛАЧХ и ЛФЧХ разомкнутой системы
в скорректированной САУ.
-
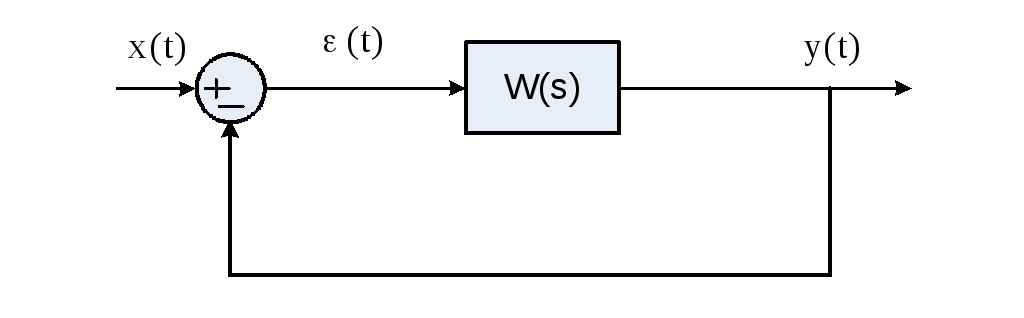
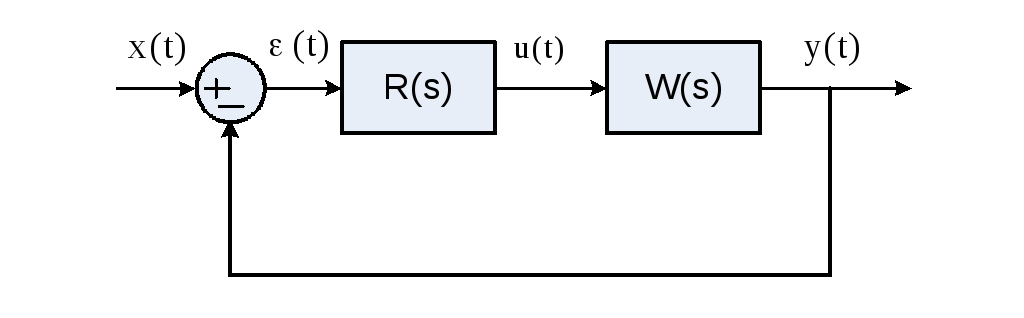
Рис. 67
Рис. 68
Таблица 21
|
№ варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Параметры | ||||||||
|
a |
0,5 |
1,0 |
1,5 |
2,0 |
2,5 |
3,0 |
3,5 |
4,0 |
|
K0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
T, c |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
ξ |
0,6 |
0,7 |
0,8 |
0,8 |
0,7 |
0,9 |
0,5 |
0,4 |
|
|
0 |
0 |
0,05 |
0 |
0,10 |
0,07 |
0 |
0 |
|
tрег , c ≤ |
1,3 |
1,5 |
2,0 |
2,5 |
3,0 |
3,5 |
4,0 |
4,0 |
|
|
0 |
10 |
10 |
5 |
5 |
5 |
0 |
0 |