

Глава 1. Изучение пакетов matlab и scilab
1.1. Краткие сведения о работе в среде MatLab
MatLab– это популярная система компьютерной математики производства корпорацииMathSoft, которая предназначена для выполнения инженерных и научных вычислений, к типичным из которых можно отнести следующие:
простейшие расчеты по формулам;
решение нелинейных уравнений и систем;
решение задач линейной алгебры;
решение задач оптимизации;
задачи обработки экспериментальных данных;
решение обыкновенных дифференциальных уравнений и систем;
Кроме того, MatLabпредоставляет широкие возможности по созданию и редактированию различных видов графиков и поверхностей.
Работа в MatLabможет осуществляться несколькими способами. При работе в командной строке пользователь вводит команды. При нажатии клавишиEnterкоманда выполняется и программа выводит полученный результат, который можно сохранить при необходимости. Однако сами команды при этом не сохраняются. Другой способ – сохранение команд в файле с расширением “*.m”, который потом можно выполнить. Кроме того, можно осуществить визуальное имитационное моделирование с помощью пакета Simulink, который входит в составMatLab. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым пользователь на экране из библиотеки стандартных блоков создает модель системы и запускает моделирование. В отличие от классических способов моделирования пользователю не нужно разрабатывать программное обеспечение, реализующее моделирование с помощью численных методов математики, достаточно лишь знать уравнение моделируемого объекта или системы.
Примеры работы в среде MatLab:
Запускаем MatLabи переходим
в окно командной строки (CommandWindow). Осуществим
математический расчет – вычисление![]() с помощью командной строки (или вm-файле):
с помощью командной строки (или вm-файле):
>> sqrt((2+exp(2))/sin(pi/2))
ans =
3.0642
Зададим матрицу размером 3х3:
>> A=[1 3 4; 2 0 5; 6 5 7]
A =
1 3 4
2 0 5
6 5 7
Просуммируем матрицу Aс 10:
>> A+10
ans =
11 13 14
12 10 15
16 15 17
Выведем второй столбец и третью строку матрицы A:
>> A(1:3, 2)
ans =
3
0
5
>> A(3, 1:3)
ans=
6 5 7
Определим матрицу Bразмером 3x3 и перемножим матрицыAи В сначала по правилам умножения матриц, а затем поэлементно:
B =
1 0 1
3 0 2
4 0 5
>> A*B
ans =
26 0 27
22 0 27
49 0 51
>> A.*B
ans =
1 0 4
6 0 10
24 0 35
Построим графики функций параболы (красным цветом и сплошной линией) и синусоиды (черным цветом и штриховой линией) при значении аргумента, меняющемся от 0 до 10 с шагом 0.1, поместив на график название:
>> x=0:0.1:10;
>> f=x.^2;
>> z=10*sin(x);
>> plot(x,f, 'r',x,z,'--k')
>> xlabel('x')
>> ylabel('f(x), z(x)')
>> title('f(x)=x^2; z(x)=sin(x)')
Результат приведен на рис. 1.
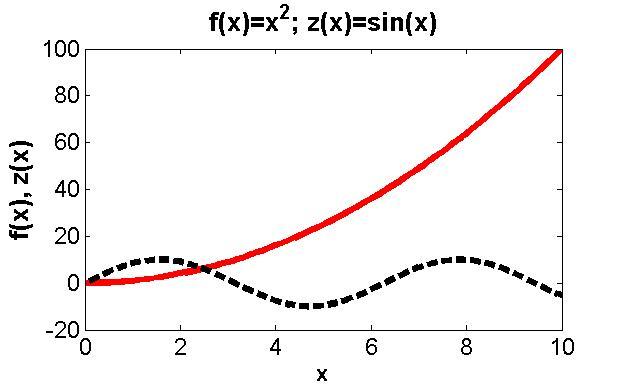
Рис. 1. Построение графиков функций в MatLab
Далее построим те же графики в двух разных окнах, нанеся сетку (grid):
>>subplot(2,1,1), plot(x,f, '.r');
>>grid
>> xlabel('x')
>> ylabel('f(x), z(x)')
>> ylabel('f(x)')
>> title('f(x)=x^2')
>> subplot(2,1,2), plot(x,z, '--k');
>>grid
>> xlabel('x')
>> ylabel('z(x)')
>> title('z(x)=sin(x)')
Результат построения приведен на рис. 2
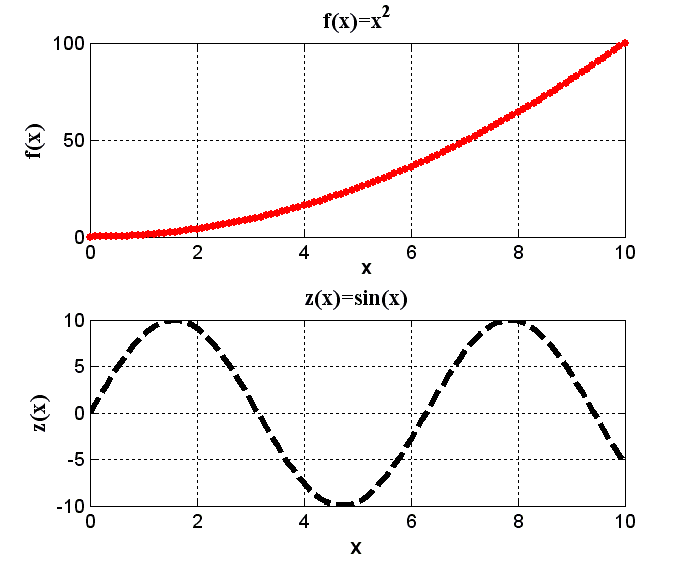
Рис. 2. Построение графиков в двух окнах
Более подробно методика проведения расчетов в MatLabиSciLab, а также параметры, необходимые для построения графиков, рассмотрены в гл. 9, а в гл. 10 приведено описание среды визуального имитационного моделированияSimulink.