

8.2. Коррекция статических свойств сау
Статические свойства системы определяются
величиной установившейся ошибки
![]() вызванной действием задающего воздействия
и определяемой по формуле
вызванной действием задающего воздействия
и определяемой по формуле
![]() (45)
(45)
Величины
![]() называются коэффициентами ошибок и
определяются по формулам
называются коэффициентами ошибок и
определяются по формулам
![]() (46)
(46)
где
![]() – передаточная функция САУ по ошибке
управления, равная
– передаточная функция САУ по ошибке
управления, равная
![]() (47)
(47)
где
![]() – передаточная функция разомкнутой
САУ.
– передаточная функция разомкнутой
САУ.
Основными способами уменьшения статической ошибки системы являются:
1) увеличение коэффициента усиления прямого канала системы;
2) повышение порядка астатизма (введением интегрирующих звеньев);
3) охват объекта управления местной неединичной положительной обратной связью;
4) применение регулирования по производным ошибки (введением дифференцирующих звеньев);
5) использование комбинированного управления;
Рассмотрим подробнее первые три способа.
8.3. Увеличение коэффициента усиления
Прямого канала системы
Представим структурную схему системы
в виде, изображенном на рис. 62, где через
![]() обозначена передаточная функция
неизменяемой части системы
обозначена передаточная функция
неизменяемой части системы
 (48)
(48)
Здесь и далее полагается, что
![]() – изменяемый коэффициент усиления
регулятора системы.
– изменяемый коэффициент усиления
регулятора системы.
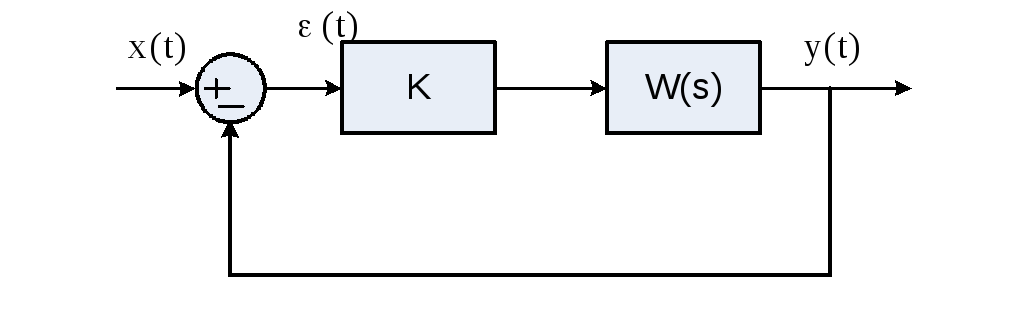
Рис. 62. Изменение коэффициента усиления прямого канала системы
Первые два коэффициента ошибок
![]() и
и![]() определяются выражениями
определяются выражениями
![]() (49)
(49)
 (50)
(50)
Из (49) и (50) с учетом (43) следует, что с увеличением Kстатическая ошибка в системе уменьшается. Если же коэффициент усиленияKуменьшается, то статическая ошибка в системе растет.
8.4. Введение интегрирующих звеньев в прямой
Канал системы
Введем в прямой канал системы одно
интегрирующее звено (рис. 63). В этом
случае
![]()
![]() .
.
Так как
![]() то система на рис. 63 является астатической
(с астатизмом первого порядка). Система
имеет нулевую статическую ошибку при
отработке постоянного задающего
воздействия
то система на рис. 63 является астатической
(с астатизмом первого порядка). Система
имеет нулевую статическую ошибку при
отработке постоянного задающего
воздействия![]() и постоянную, обратно пропорциональнуюK, ошибку
и постоянную, обратно пропорциональнуюK, ошибку![]() при отработке линейно изменяющегося
воздействия
при отработке линейно изменяющегося
воздействия![]() .
.
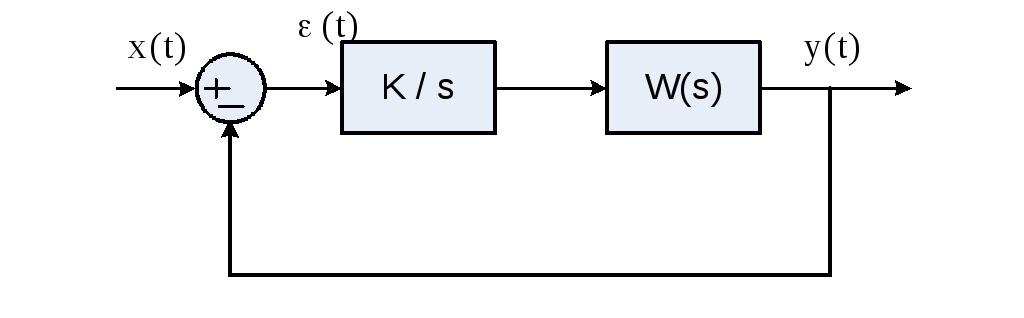
Рис. 63. Введение в прямой канал системы интегрирующих звеньев
8.5. Охват объекта управления местной неединичной
Положительной обратной связью
Охватим неизменяемую часть системы
![]() местной неединичной положительной
обратной связью с коэффициентом усиления
местной неединичной положительной
обратной связью с коэффициентом усиления![]() (рис. 64).
(рис. 64).
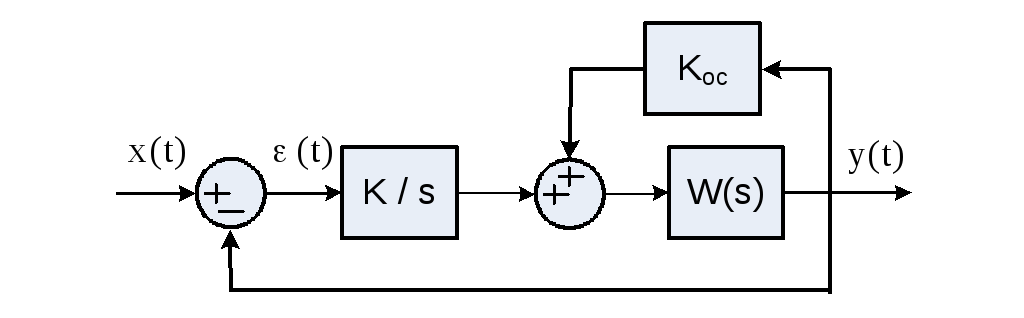
Рис. 64. Охват объекта управления местной неединичной положительной обратной связью
Тогда эквивалентная передаточная
функция
![]() неизменяемой части системы равна
неизменяемой части системы равна

Если коэффициент усиления Kвыбрать из условия
![]() (51)
(51)
то
свободный коэффициент
![]() полинома знаменателя
полинома знаменателя![]() обратится в нуль и
обратится в нуль и![]() приобретает интегрирующие свойства:
приобретает интегрирующие свойства:
 (52)
(52)
Следовательно, замкнутая система
становится астатической (с астатизмом
1-го порядка). Отсюда
![]() =
0, а коэффициент
=
0, а коэффициент![]() будет равен
будет равен
![]()
8.6. Коррекция динамических свойств сау
Задача коррекции состоит в повышении
динамической точности САУ в переходных
режимах. Улучшение динамических свойств
САУ заключается в увеличении быстродействия
САУ (уменьшении времени регулирования
tрег), уменьшении
перерегулирования![]() ,
а также увеличении запасов устойчивости
по фазе
,
а также увеличении запасов устойчивости
по фазе![]() и по модулю
и по модулю![]() .
При этом
.
При этом
![]()
где
![]() –
максимальное значение переходной
характеристики замкнутой САУ
–
максимальное значение переходной
характеристики замкнутой САУ![]() ;
;![]() – установившееся значение
– установившееся значение![]() .
.
Время регулирования
![]() – минимальная величина, при которой
удовлетворяется условие
– минимальная величина, при которой
удовлетворяется условие
![]()
где
![]() – заданная величина ошибки (обычно
– заданная величина ошибки (обычно![]() =0,05
=0,05![]() ,
пример приведен на рис. 65).
,
пример приведен на рис. 65).
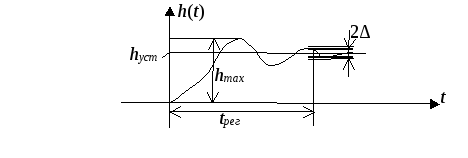
Рис. 65. Типовой переходный процесс в САУ
Для решения задачи коррекции динамических свойств САУ используются следующие методы:
– последовательная коррекция;
– параллельная коррекция;
– коррекция локальной ОС.
Наиболее эффективным средством достижения цели коррекции является уменьшение отрицательных фазовых сдвигов в прямом канале системы путем охвата неизменяемой части системы местными отрицательными обратными связями.
На рис. 66 R(s) представляет собой передаточную функцию регулятора САУ, которая считается заданной.
Пусть неизменяемая часть системы представляет собой апериодическое звено первого порядка, т. е.
![]()
Тогда передаточная функция
![]() эквивалентного объекта управления
равна
эквивалентного объекта управления
равна
![]()
где
![]() и
и![]() – коэффициент усиления и постоянная
времени эквивалентного объекта:
– коэффициент усиления и постоянная
времени эквивалентного объекта:
![]() (53)
(53)
![]()
![]() (54)
(54)
Из (54) следует, что соответствующим
выбором
![]() постоянную времени
постоянную времени![]() эквивалентного объекта можно уменьшить
в(1+
эквивалентного объекта можно уменьшить
в(1+![]() )раз по сравнению с постоянной времени
)раз по сравнению с постоянной времени![]() объекта без местной обратной связи. Тем
самым уменьшаются отрицательные фазовые
сдвиги, вносимые прямым каналом системы,
что приводит к увеличению запасов
устойчивости системы. При этом, однако,
уменьшается в (1+
объекта без местной обратной связи. Тем
самым уменьшаются отрицательные фазовые
сдвиги, вносимые прямым каналом системы,
что приводит к увеличению запасов
устойчивости системы. При этом, однако,
уменьшается в (1+![]() )
раз коэффициент усиления
)
раз коэффициент усиления![]() эквивалентного объекта по сравнению с
коэффициентом усиления
эквивалентного объекта по сравнению с
коэффициентом усиления![]() объекта без местной обратной связи. Это
нежелательно, так как приводит к
уменьшению быстродействия системы
вследствие уменьшения общего коэффициента
усиления прямого канала системы. В этом
случае с целью обеспечения необходимого
быстродействия системы увеличивают
коэффициент усиления регулятора.
объекта без местной обратной связи. Это
нежелательно, так как приводит к
уменьшению быстродействия системы
вследствие уменьшения общего коэффициента
усиления прямого канала системы. В этом
случае с целью обеспечения необходимого
быстродействия системы увеличивают
коэффициент усиления регулятора.
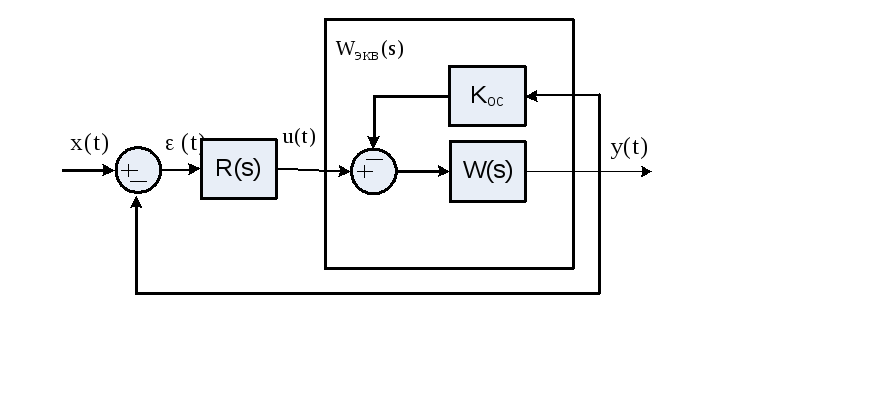
Рис. 66. Коррекция динамических свойств САУ введением локальной ОС