

Глава11. Работа в средеxcos
11.1. Основные возможности Xcos
Xcosпредоставляет возможности для визуального построения моделей динамических систем, используя блок-схемы. Многие предопределенные блоки также представлены в различных палитрах.
Симулятор Xcosиспользует различные возможности для управления моделированием. С помощьюXcosможно произвести имитационное моделирование как непрерывных, так и дискретных систем. Соответственно, для непрерывного времени используется решатель однородных дифференциальных уравнений (ОДУ), а для дискретного – решатель дифференциальных алгебраических уравнений (ДАУ).
11.2. Запуск Xcos
Приложение Xcosможно запустить, используя меню главного окна SciLab: меню Инструменты – Визуальное моделированиеXcos(рис. 80).
После запуска Xcosоткрывается окно Палитры блоков (рис. 81) и окно диаграммы, представляющее пустое поле набора модели.
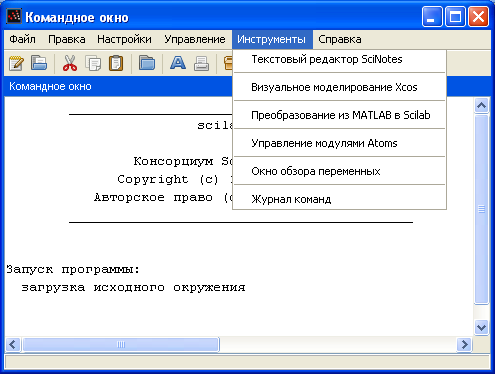
Рис. 80. Запуск Xcos
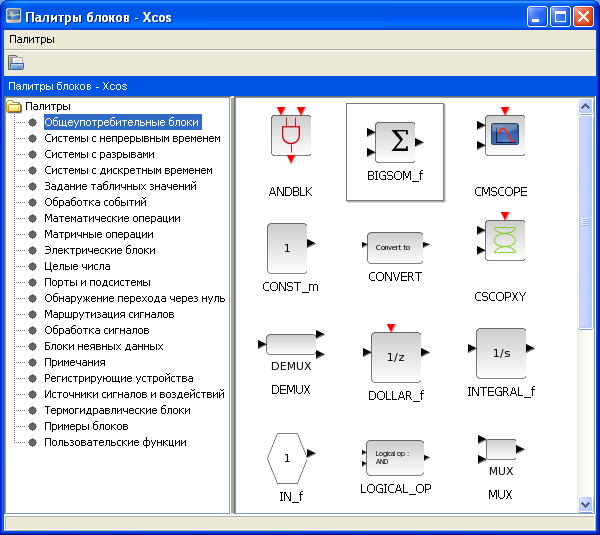
Рис. 81. Окно палитры блоков
В Xcosпредставлены следующие палитры блоков:
источники сигналов и воздействий – предназначены для формирования сигналов различной природы (постоянные сигналы, гармонические сигналы, сигналы с постоянной скоростью нарастания сигнала, случайные сигналы и др.);
регистрирующие устройства – блоки, предназначенные для отображения результатов моделирования в виде графиков;
системы с непрерывным временем – блоки для создания линейных непрерывных систем, в виде передаточных функций и систем в пространстве состояний;
системы с разрывами – блоки нелинейностей;
системы с дискретным временем - блоки для создания линейных дискретных систем;
задание табличных значений – блоки для задания нелинейностей в табличном виде;
математические операции – блоки, реализующие различные математические операции (суммирование и произведение сигналов, вычисление тригонометрических функций и др.);
маршрутизация сигналов – блоки объединения, расщепления сигналов;
другие.
11.3. Создание модели системы
Для создания модели нужные блоки, составляющие модель, переносятся на поле диаграммы и соединяются. Соединение блоков производят мышью путем соединения выходов и входов соответствующих блоков.
К блокам, у которых предусмотрена активация (верхний вход, отмеченный красным цветом), необходимо подключить активационный блок (как правило, часы).
На рис. 82 приведена простая модель, состоящая из единичного источника сигнала, блока передаточной функции, осциллографа и активационного элемента.
При работе иногда возникает необходимость объединять сигналы в шину, для этого используется блок мультиплексирования MUX. На рис. 83 приведена модель, содержащая три различных источника сигналов, объединённых в шину. Сигнал с шины поступает на осциллограф, который в своём окне отображает все три сигнала.
 Рис.
82. Пример модели
Рис.
82. Пример модели
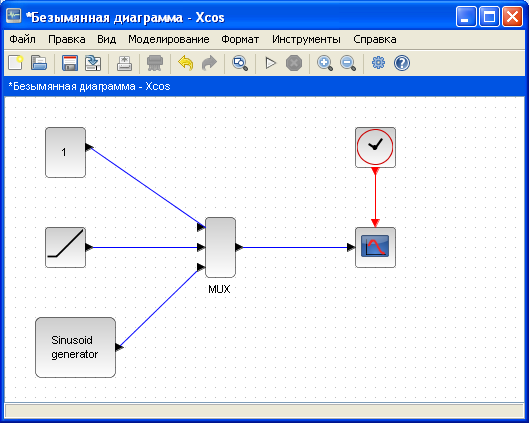
Рис. 83. Пример модели с объединением сигналов в шину
11.4. Настройка параметров моделирования
Для настройки параметров моделирования воспользуйтесь меню окна Моделирование – Параметры. Окно настройки параметров приведено на рис. 84.
С помощью данного окна можно задать следующие параметры:
конечное время интегрирования – время моделирования;
количество секунд в единице времени;
погрешности моделирования;
другие параметры.
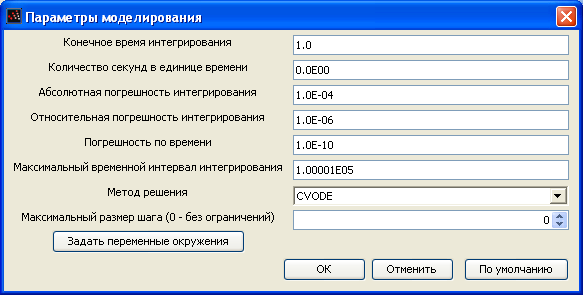
Рис. 84. Окно настройки параметров