

1.2. Работа в среде SciLab
SciLab — это система компьютерной математики, предназначенная для решения вычислительных задач.
SciLab выпускается для операционных систем Windows, Unix/Linux и не нуждается в больших системных ресурсах. SciLab является типичным командным интерпретатором и структурно состоит из интерпретирующей системы, принимающей команды пользователя и возвращающей результаты, и двух библиотек: собственных функций и дополнительных – на языках С и Fortran.
Как и MatLab, SciLab имеет развитые инструменты для создания и манипулирования массивами (векторами, матрицами и пр.), поддерживаются и другие сложные структуры (списки), объединяющие последовательности данных произвольного типа.
Проведение математических расчетов в SciLabподобноMatLab. Методика построения графиков в командной строке или сценарииSciLabсхожа с подобной дляMatLab(график приведен на рис. 3):
x=0:0.1:10;
f=x.^2;
z=sin(x);
plot(x, f,'r-.', x, z, 'k--')
xlabel('x')
ylabel('f(x), z(x)')
legend('x^2', 'sin(x)')
title('f(x)=x^2, z(x)=sin(x)')
Команды для построения графиков в двух полях также подобны командам MatLab:
subplot(211)
plot(x, f,'r-.')
xlabel('x')
ylabel('f(x)')
title('x^2')
subplot(212)
plot(x, z, 'k--')
ylabel('z(x)')
xlabel('x')
title('sin(x)')
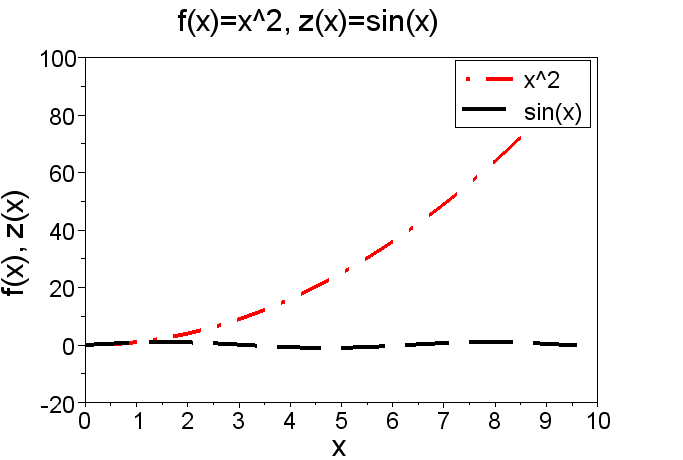
Рис. 3. Построение графиков в SciLab
Все вышеприведенные команды могут быть сохранены в файле сценария SciLab(*.sce). Методика работы со сценариямиSciLab, а также описание сред визуального имитационного моделированияSimulinkиXcosприведены в гл. 10–11.
Практическая работа
Цель работы: приобретение навыков работы в программных средах MatLab и SciLab. Теоретическая часть работы включает следующие пункты:
изучение среды MatLab, знакомство с языком программирования MatLab, создание и запуск m-файлов, создание массивов, построение графиков функций;
изучение подсистемы MatLab Simulink, знакомство с основными блоками, создание моделей;
изучение среды SciLab, знакомство с языком программирования SciLab, создание и запуск файлов сценариев, создание массивов, построение графиков;
изучение среды визуального моделирования Xcos, знакомство с палитрой компонентов.
Задания на практическую работу
Задание 1
Сформировать матрицы указанной размерностью и заполнить произвольными значениями. Вывести элементы указанного столбца (столбцов) или/и строки (строк) на печать.
Таблица 1
Варианты заданий для работы с матрицами
|
Вариант |
Размерность матрицы (строк х столбцов) |
Строки на печать |
Столбцы на печать |
|
1 |
5 х 6 |
2 |
3, 6 |
|
2 |
5 х 5 |
2, 3 |
1 |
|
3 |
6 х 7 |
4 |
2, 3 |
|
4 |
6 х 6 |
5 |
3, 4 |
|
5 |
4 х 8 |
3 |
4, 6 |
|
6 |
4 х 9 |
1, 2 |
7 |
|
7 |
5 х 7 |
3, 4 |
6 |
|
8 |
8 х 5 |
5, 7 |
4 |
|
9 |
7 х 7 |
5, 7 |
5 |
|
10 |
6 х 5 |
5 |
4, 5 |
|
11 |
5 х 8 |
4 |
5, 7 |
|
12 |
8 х 7 |
7, 8 |
5 |
Задание 2
Построить графики функций y=f(x) на заданном интервале (от aдоb), рассчитав значения с заданным шагом (h), для каждого графика вывести легенду, название графика, подписи осей. Графики построить в двух вариантах: 1 – в одном графическом окне на одном поле; 2 – в одном графическом окне в двух полях.
Таблица 2
Варианты задания для построения графиков
|
№ |
Функция 1 |
Функция 2 |
a |
b |
h |
|
1 |
у = sin(x) |
z = exp(x+3)/5000 –1 |
–2π |
2π |
π /20 |
|
2 |
у = cos(x) |
z = 0,00025x3-x-0,6 |
–2 |
2π |
π /20 |
|
3 |
у = |tg(x)| + 0,1 |
z = (1+x)2 |
–2π |
2π |
π /20 |
|
4 |
у = (х2-1)/15 |
z = 1+sin(x) |
–2π |
2π |
π /20 |
|
5 |
у = (хЗ–2)/15 |
z = 5cos(x) |
–2π |
2π |
π /20 |
|
6 |
у = х2–10 |
z = 0,025exp(-1,2x) |
–5 |
5 |
1/10 |
|
7 |
у = 3sin(x) |
z = 0,015x3 |
–5 |
5 |
1/10 |
|
8 |
у = 4sin(x) |
z = 0,05x2 |
1 |
10 |
1/5 |
|
9 |
у = 6sin(x) |
z = 0,01x3 |
–10 |
10 |
1/5 |
|
10 |
у = 2+cos(x) |
z = -0,05(x2 + 10cos(x)) |
–8 |
8 |
1/5 |
|
11 |
у = sin2(x/3) |
z = 0,01(x2-40sin(x)) |
–8 |
8 |
1/10 |
|
12 |
у = cos3(x) |
z = sin(x) + sin(2x) |
–π |
π |
π /8 |
|
13 |
у = 0,5х + cos2(x) |
z = sin2(x) + cos(x) |
–π |
π |
π /8 |
|
14 |
у = sin(x) + cos2(2x) |
z = x(0,5 + x)exp(0,1x) |
–π |
0 |
π /8 |
|
15 |
у = |sin(x)|exp(x/2) |
z = 5x – x2+sin(x) |
0 |
5 |
0,5 |
Задание 3
Ознакомиться с палитрой компонентов, изучить методы набора моделей с использованием блоков источников и приёмников сигналов, рассмотреть, каким образом производится маршрутизация сигналов. Ознакомиться с возможностью создания подсистем. Рассмотреть порядок сохранения и загрузки модели, запуск модели на исполнение, сохранение результатов.
Создать в визуальном редакторе схему, состоящую из нескольких источников сигналов (постоянного, гармонического, линейно возрастающего).