

4.2. Описание соединений звеньев в MatLab
В пакете MatLab имеются команды, позволяющие получать математическое описание сложных систем по их структурным схемам.
Передаточная функция последовательного соединения Wопределяется следующими командами:
W = series(W1, W2)
или
W = W1 * W2.
Передаточная функция Wдля параллельного соединения включает следующие команды:
W = parallel(W1, W2)
или
W = W2 + W1
При охвате звена W1 обратной связьюW2 передаточная функция замкнутой системы определяется выражением
W = feedback(W1, W2)
При положительной обратной связи команда определения Wизменяется следующим образом:
W = feedback(W1, W2, +1)
Пример:
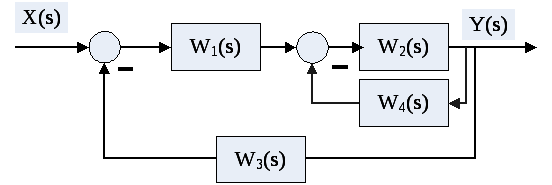
Рис. 30. Пример структурной схемы
Пусть передаточные функции элементов
определяются как
W1(s)=![]() ,
W2(s)=
,
W2(s)=
![]() ,
W3(s)=
,
W3(s)=
![]() ,
W4(s)=
k4.
Реализация структуры рис. 30 вMatLabбудет выглядеть следующим образом:
,
W4(s)=
k4.
Реализация структуры рис. 30 вMatLabбудет выглядеть следующим образом:
k1 = 1;
k2 = 2;
k3 = 3;
k4 = 4;
W1 = tf(k1)
W2 = tf(k2, [1 0])
W3 = tf(k3)
W4 = tf(k4)
W24 = feedback(W2, W4)
W124 = series(W1, W24)
W1234 = feedback(W124, W3)
Результат работы программы:
Transfer function:
1
Transfer function:
2
-
s
Transfer function:
3
Transfer function:
4
Transfer function:
2
-----
s + 8
Transfer function:
2
-----
s + 8
Transfer function:
2
------
s + 14
4.3. Описание соединений звеньев в среде SciLab
Для записи скрипта, предназначенного для преобразования структурных схем в среде SciLab необходимо использовать классические математические операторы, предназначенные для получения эквивалентных схем:
W12 = W1 * W2– последовательное соединение звеньев с передаточными функциямиW1иW2;
W12 = W1 + W2– параллельное соединение звеньев с передаточными функциямиW1иW2;
W12 = W1 /. W2– передаточная функция для звена W1, охваченного отрицательной обратной связьюW2. Данное выражение эквивалентноW12 = W1 * (1 + W1 * W2)^-1.
Пример скрипта для схемы, приведённой на рис. 30.
k1 = 1;
k2 = 2;
k3 = 3;
k4 = 4;
W1 = k1
W2 = syslin('c', k2/%s)
W3 = k3
W4 = k4
W24 = W2 /. W4
disp(W24)
W124 = W1 * W24
disp(W124)
W1234 = W124 /. W3
disp(W1234)
Результат выполнения скрипта:
2
-----
8 + s
2
-----
8 + s
2
-----
14 + s
Практическая работа
Цель работы – изучить основные виды соединений в структурных схемах САУ и правила преобразования соединений.
Задание к практической работе
Изучить основные виды соединений звеньев в структурных схемах САУ.
Изучить правила преобразования соединений в структурных схемах САУ (перенос сумматоров и ветвлений).
Согласно варианту задания выбрать из табл. 8, и табл. 10 передаточные функции и значения параметров для них.
Согласно варианту задания и табл.9 изобразить структурную схему САУ.
По правилам преобразования получить выражение для эквивалентной передаточной функции.
С использованием script-языка объявить передаточные функции в MatLab (SciLab) и записать последовательность команд для вывода эквивалентной согласно варианту задания.
Содержание отчёта
Отчёт должен содержать:
Задание на лабораторную работу согласно варианту.
Теоретический расчет эквивалентной передаточной функции.
Текст программы для вывода эквивалентной ПФ по заданию к лабораторной работе. Привести результаты работы программы.
Сравнение результатов пп.2–3 . Выводы.