

11.5. Создание суперблоков
Суперблок – это фрагмент модели, оформленный в виде отдельного блока. Использование суперблоков предназначено для уменьшения количества одновременно отображаемых блоков на экране, что облегчает восприятие модели (в идеале модель полностью должна отображаться на экране монитора), а также позволяет создавать и отлаживать фрагменты модели по отдельности, что повышает технологичность создания модели.
На рис. 85–87 последовательно показана процедура объединения части модели в суперблок.
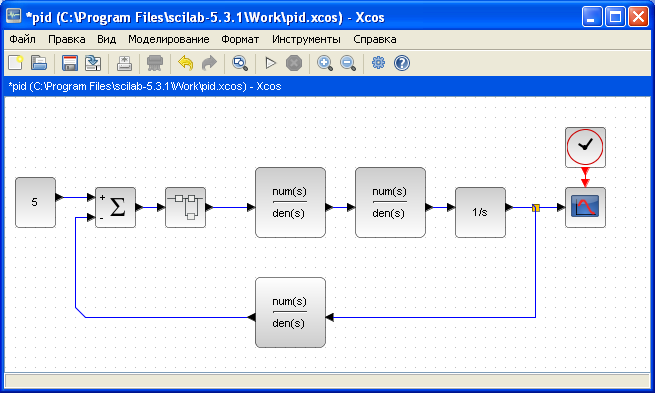
Рис. 85. Пример модели
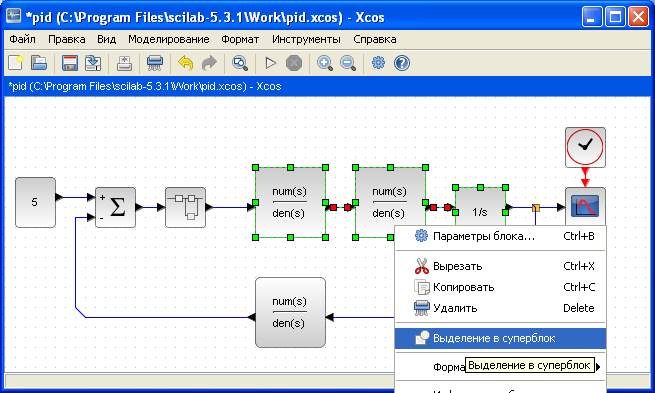
Рис. 86. Выделение части модели и вызов меню для объединения в суперблок
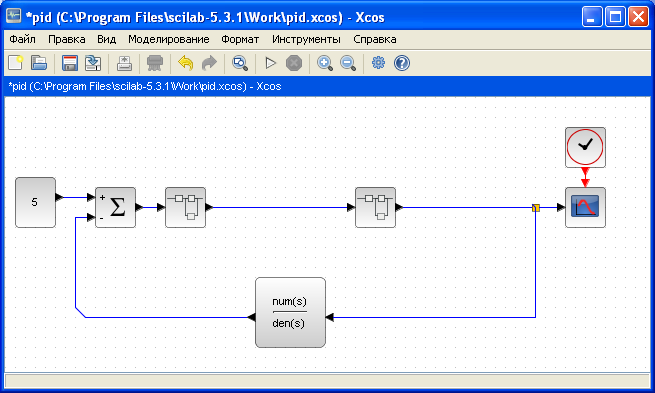
Рис. 87. Пример модели с объединенной частью в суперблок
11.6. Описание свойств основных блоков Xcos
Таблица 34
Источники сигналов и воздействий
|
Изображение |
Название |
Описание | |
|
|
CONST_m |
Источник постоянного сигнала |
Задает постоянный по уровню сигнал |
|
|
GENSIN_f |
Источник синусоидального сигнала |
Формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением |
|
|
RAMP |
Источник линейно изменяющегося воздействия |
Формирует линейный сигнал вида y = Slope* time + Initial value |
|
|
STEP_FUNCTION |
Генератор ступенчатого сигнала |
Формирует ступенчатый сигнал |
|
|
CLOCK_c |
Управление модельным временем |
Формирует сигнал управления модельным временем |

Таблица 35
Регистрирующие устройства
|
Изображение |
Название |
Описание | |
|
|
CSCOPE |
Осциллограф |
Строит графики исследуемых сигналов в функции времени, позволяет наблюдать за изменениями сигналов в процессе моделирования |
|
|
CSCOPEХY |
Графопостроитель |
Строит график одного сигнала в функции другого |


Таблица 36
Системы с непрерывным временем
|
Изображение |
Название |
Описание | |
|
|
DERIV |
Блок вычисления производной |
Выполняет численное дифференцирование входного сигнала |
|
|
LNTEGRAL_f |
Интегрирующий блок |
Выполняет интегрирование входного сигнала |
|
|
CLR |
Блок передаточной функции |
Блок передаточной характеристики задает передаточную функцию в виде отношения полиномов |
|
|
CLSS |
Блок модели динамического объекта |
Блок создает динамический объект, описываемый уравнениями в пространстве состояний |
|
|
PID |
ПИД-регулятор |
Блок, реализующий ПИД закон регулирования |



Таблица 37
Системы с разрывами
|
Изображение |
Название |
Описание | |
|
|
BACKLASH |
Блок люфта |
Моделирует нелинейность типа “люфт” |
|
|
DEADBAND |
Блок с зоной нечувствительности |
Реализует нелинейную зависимость типа "зона нечувствительности (мертвая зона)" |
|
|
HYSTERESIS |
Блок гистерезисной характеристики (+Релейный блок) |
Реализует гистерезисную, а также релейную нелинейность |
|
|
SATURATION |
Блок ограничения |
Выполняет ограничение величины сигнала |




Таблица 38
Математические операции
|
Изображение |
Название |
Описание | |
|
|
ABS_VALUE |
Блок вычисления модуля |
Выполняет вычисление абсолютного значения величины сигнала |
|
|
BIGSOM_f |
Блок вычисления суммы |
Выполняет вычисление суммы текущих значений сигналов |
|
|
PRODUCT |
Блок умножения |
Выполняет вычисление произведения текущих значений сигналов |
|
|
SIGNUM |
Блок определения знака сигнала |
Определяет знак входного сигнала |
|
|
GAINBLK_f |
Усилители |
Выполняет умножение входного сигнала на постоянный коэффициент |




Окончание табл. 38
|
Изображение |
Название |
Описание | |
|
|
INVBLK_f LOGBLK_f POWERBLK_f SQRT |
Блоки вычисления математических функций |
Выполняет вычисление математической функции |
|
|
TrigFun |
Блок вычисления тригонометрических функций |
Выполняет вычисление тригонометрической функции |
|
|
MAX_f MIN_f |
Блоки определения минимального или максимального значения |
Определяют максимальное или минимальное значение из всех сигналов, поступающих на его входы |







Таблица 39
Вспомогательные блоки
|
Изображение |
Название |
Описание | |
|
|
INTRPLBLK_f |
Блок одномерной таблицы |
Задает в табличной форме функцию одной переменной. |
|
|
MUX |
Блок шинного формирователя |
Формирует шину из сигналов различных типов. |
