

5.2. Системы автоматического управления по возмущению (системы компенсации)
Для разомкнутых систем с управлением по возмущению характерно то, что управляющий сигнал формируется в зависимости от величины основного возмущающего воздействия. Эти системы предназначены для уменьшения влияния возмущающего воздействия на выходную величину объекта управления путем измерения самого этого воздействия и компенсации его влияния за счет искусственного воздействия на процесс.
На рис. 33 приняты обозначения:
Д – датчик возмущающего воздействия;
![]() – сигнал, пропорциональный возмущающему
воздействию;
– сигнал, пропорциональный возмущающему
воздействию;
![]() – сигнал на входе усилителя.
– сигнал на входе усилителя.
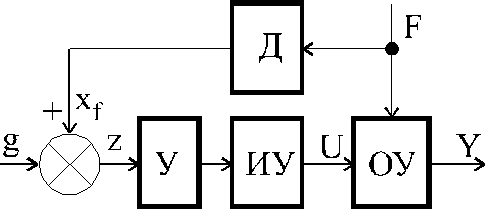
Рис. 33. Функциональная схема САУ по возмущению
В рассматриваемой системе
![]() .
Можно считать, что сигнал
.
Можно считать, что сигнал![]() связан с возмущающим воздействием
соотношением
связан с возмущающим воздействием
соотношением![]() ,
где
,
где![]() – коэффициент передачи датчика.
– коэффициент передачи датчика.
Из рассмотрения кривых видно, что система управления по возмущению имеет семейство нагрузочных характеристик.
В рассматриваемой системе нагрузочные характеристики зависят не только от свойств объекта, но и от свойств устройств управляющей части системы. Подбирая коэффициент усиления усилителя или коэффициент передачи датчика, можно получить необходимую нагрузочную характеристику системы.
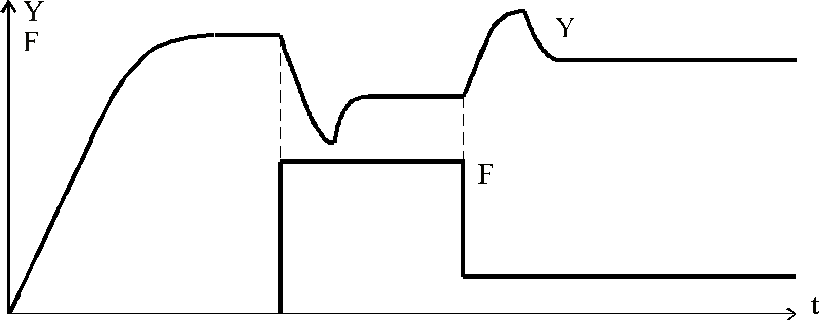
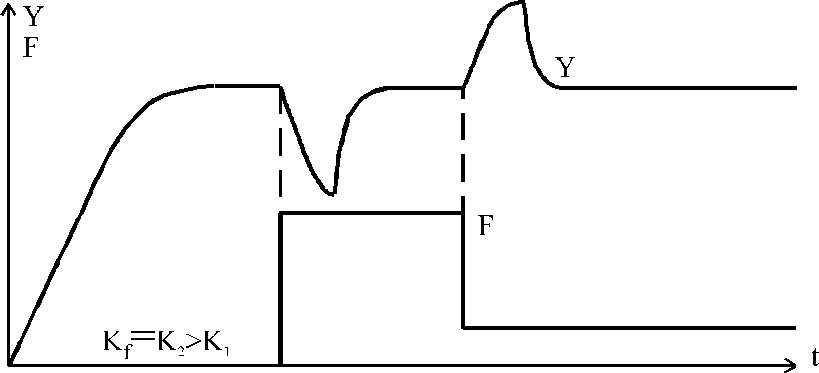
Рис. 34. Изменение выходного сигнала при изменении возмущения
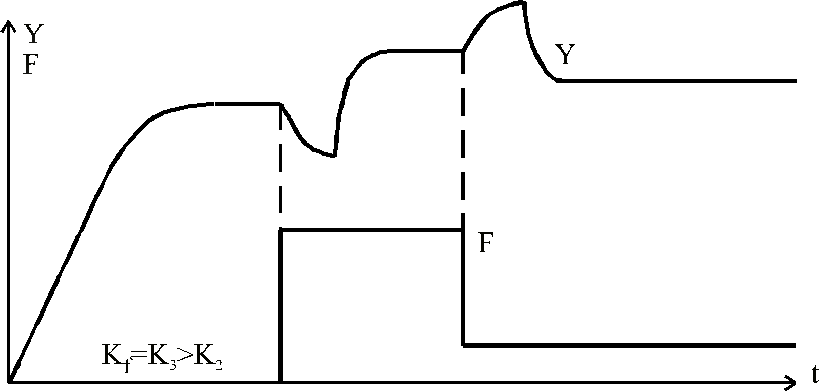
Рис. 35.
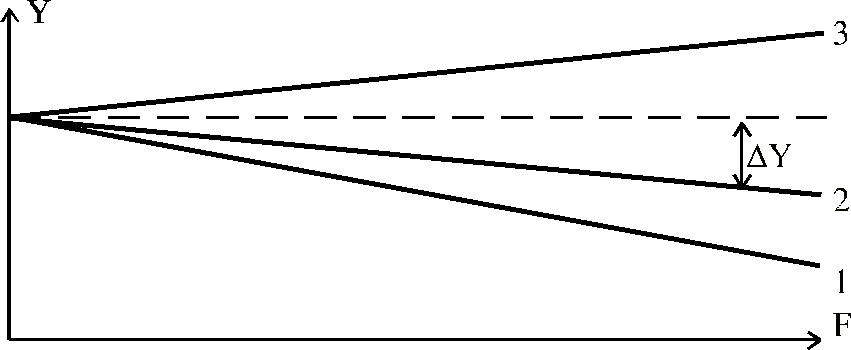
Рис. 36. Семейство нагрузочных характеристик САУ
Достоинства систем управления по возмущению:
1. В системах управления по возмущению можно добиться полной компенсации влияния возмущающего воздействия на выходную величину в установившемся режиме работы.
2. Эти системы должны быстро реагировать на меняющееся возмущающее воздействие, так как изменение сигнала на выходе усилителя происходит одновременно с изменением возмущающего воздействия.
Недостатки систем управления по возмущению:
1. В системах управления на объект действует несколько возмущающих воздействий. Те возмущения, которые не измеряются, будут вызывать изменение выходной величины.
2. Трудность измерения возмущающих воздействий. В ряде случаев возмущающие воздействия трудно измерить, например, момент сопротивления на валу двигателя.
5.3. Замкнутые системы автоматического управления
В замкнутых САУ управляющее воздействие
![]() формируется в непосредственной
зависимости от управляемой величины
формируется в непосредственной
зависимости от управляемой величины![]() .
.
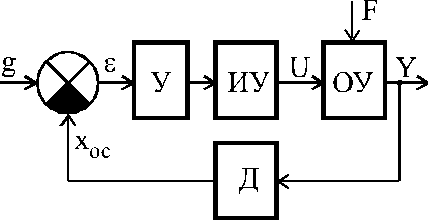
Рис. 37. Функциональная схема замкнутой САУ
В замкнутой системе сигнал с выхода
датчика Д, измеряющего выходную величину,
поступает на вход системы. Такая связь
входа системы с его выходом называется
обратной связью. Сигнал на входе усилителя
равен
![]() .
.
На рис. 37 приняты обозначения:
![]() – отклонение сигнала обратной связи
– отклонение сигнала обратной связи![]() от задающего воздействия. Если из
задающего воздействия
от задающего воздействия. Если из
задающего воздействия![]() вычитать выходную величину
вычитать выходную величину![]() ,
то
,
то![]() будет представлять отклонение регулируемой
величины от заданного значения.
будет представлять отклонение регулируемой
величины от заданного значения.
Рассмотрим, как могут изменяться
координаты системы:
![]() – отклонение,
– отклонение,![]() – управляющее воздействие,
– управляющее воздействие,![]() – выходная величина при включении
системы в работу и при изменении
возмущающего воздействия
– выходная величина при включении
системы в работу и при изменении
возмущающего воздействия![]() .
.
Будем полагать, что зависимости получены
при коэффициенте усиления усилителя![]() .
Работу системы можно описать следующим
образом. При включении системы, когда
.
Работу системы можно описать следующим
образом. При включении системы, когда![]() ,
величина отклонения
,
величина отклонения![]() имеет максимальное значение. Управляющее
воздействие
имеет максимальное значение. Управляющее
воздействие![]() начинает увеличиваться, вследствие
чего увеличивается выходная величина
начинает увеличиваться, вследствие
чего увеличивается выходная величина![]() .
По мере увеличения
.
По мере увеличения![]() отклонение
отклонение![]() уменьшается и наступает установившийся
режим работы.
уменьшается и наступает установившийся
режим работы.
Увеличение
![]() вызывает уменьшение выходной величины
вызывает уменьшение выходной величины![]() и увеличение отклонения
и увеличение отклонения![]() ,
что приводит к увеличению управляющего
воздействия
,
что приводит к увеличению управляющего
воздействия![]() и, следовательно, к увеличению выходной
величины.
и, следовательно, к увеличению выходной
величины.
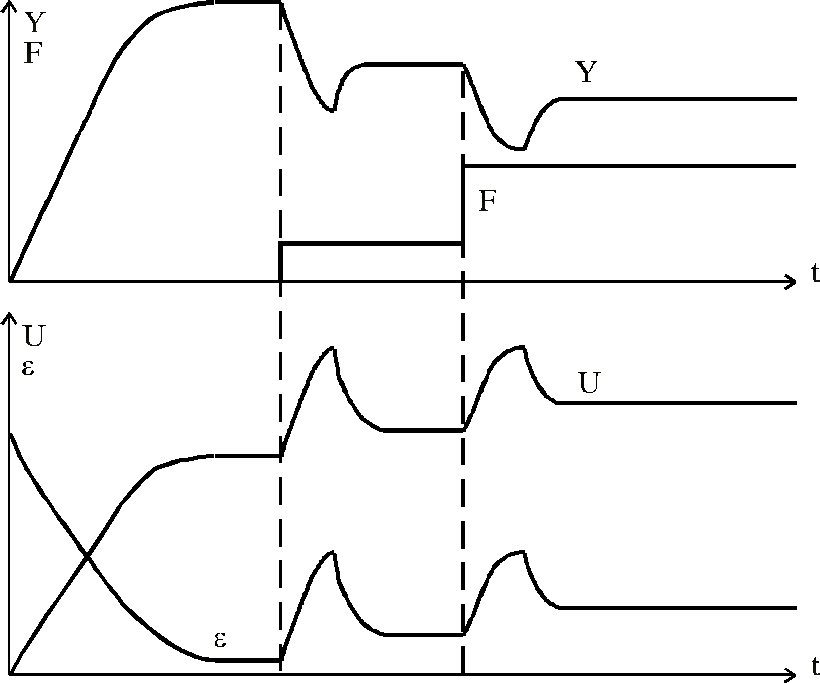
Рис. 38. Изменение координат системы
Будем полагать, что зависимости получены
при коэффициенте усиления усилителя![]() .
Работу системы можно описать следующим
образом. При включении системы, когда
.
Работу системы можно описать следующим
образом. При включении системы, когда![]() ,
величина отклонения
,
величина отклонения![]() имеет максимальное значение. Управляющее
воздействие
имеет максимальное значение. Управляющее
воздействие![]() начинает увеличиваться, вследствие
чего увеличивается выходная величина
начинает увеличиваться, вследствие
чего увеличивается выходная величина![]() .
По мере увеличения
.
По мере увеличения![]() отклонение
отклонение![]() уменьшается и наступает установившийся
режим работы.
уменьшается и наступает установившийся
режим работы.
Увеличение
![]() вызывает уменьшение выходной величины
вызывает уменьшение выходной величины![]() и увеличение отклонения
и увеличение отклонения![]() ,
что приводит к увеличению управляющего
воздействия
,
что приводит к увеличению управляющего
воздействия![]() и, следовательно, к увеличению выходной
величины.
и, следовательно, к увеличению выходной
величины.
Однако
![]() не может достичь прежнего значения, так
как увеличение управляющего воздействия
возможно лишь при увеличении
не может достичь прежнего значения, так
как увеличение управляющего воздействия
возможно лишь при увеличении![]() .
Увеличим коэффициент усиления усилителя.
Пусть
.
Увеличим коэффициент усиления усилителя.
Пусть![]() .
Рассмотрим изменение координат в этом
случае (рис. 39).
.
Рассмотрим изменение координат в этом
случае (рис. 39).
В замкнутой системе управляющее
воздействие
![]() формируется в функции отклонения
формируется в функции отклонения![]() .
Замкнутые системы называются системами
автоматического регулирования по
отклонению.
.
Замкнутые системы называются системами
автоматического регулирования по
отклонению.
На рис. 39 K1– нагрузочная характеристика САУ при коэффициенте усиленияK1;K2– нагрузочная характеристика САУ при коэффициенте усиленияK2, причемK2>K1.
В замкнутой системе регулирования, выбирая необходимое значение коэффициента усиления можно получить требуемую нагрузочную характеристику. В рассмотренной системе с увеличением возмущающего воздействия уменьшается выходная величина. Каждому новому значению возмущающего воздействия соответствует новое значение выходной величины. Такое регулирование называется статическим. Система автоматического регулирования, имеющая подобную нагрузочную характеристику, называется статической системой.
В замкнутой системе отклонение равно
![]() .
.
Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
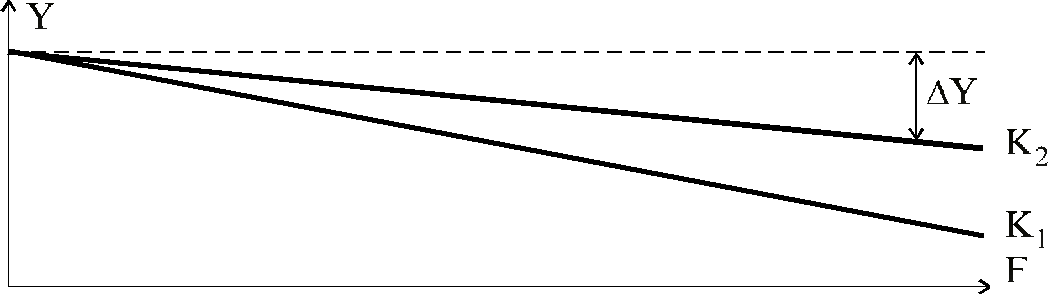
Рис. 39. Нагрузочные характеристики замкнутой САУ