

3.2. Построение частотных характеристик на основе
Передаточных функций
Рассмотрим передаточную функцию
апериодического звена первого порядка
с единичными коэффициентами, имеющего
передаточную функцию вида
![]() .
Выведем и построим различные частотные
характеристики для данного звена.
.
Выведем и построим различные частотные
характеристики для данного звена.
Перейдем от записи в операционной форме к частотному представлению:
![]() . (28)
. (28)
Получим выражения для вещественной и мнимой частотных характеристик (ВЧХ и МЧХ). Для этого избавимся от комплексного числа в знаменателе при помощи умножения числителя и знаменателя дроби на комплексно-сопряженное знаменателю:
![]() .
.
Таким образом, ВЧХ имеет вид
![]() .
.
Соответственно, МЧХ представляется как
![]() .
.
Получим выражения для АЧХ и ФЧХ согласно (23) – (24):
![]() ,
,
![]() .
.
Логарифмическая амплитудно-частотная характеристика звена
АЧХ и ФЧХ апериодического звена представлены на рис. 16 и рис. 17. АФЧХ апериодического звена представлена на рис. 18.
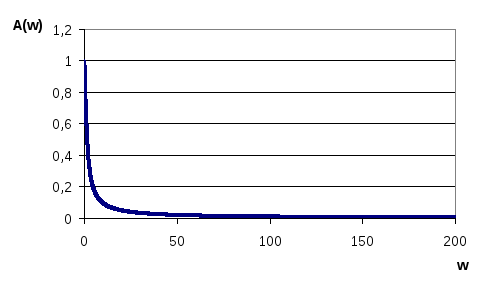
Рис. 16. АЧХ апериодического звена
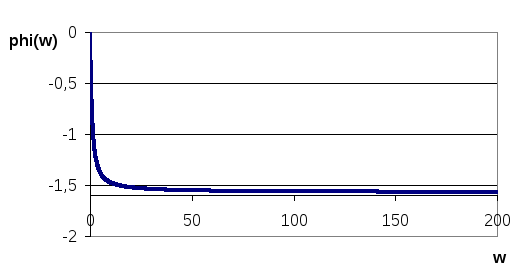
Рис. 17. ФЧХ апериодического звена
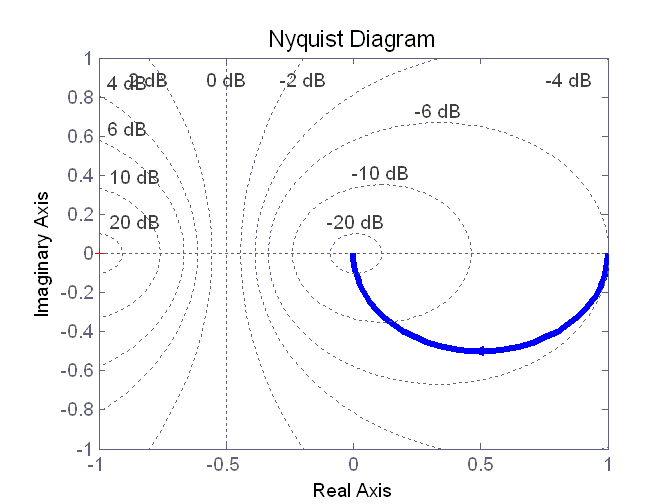
Рис. 18. АФЧХ апериодического звена
Общий вид ЛАЧХ и ЛФЧХ для различных типовых динамических звеньев приведен в табл. 7.
Таблица 7
ЛАЧХ и ЛФЧХ типовых динамических звеньев
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
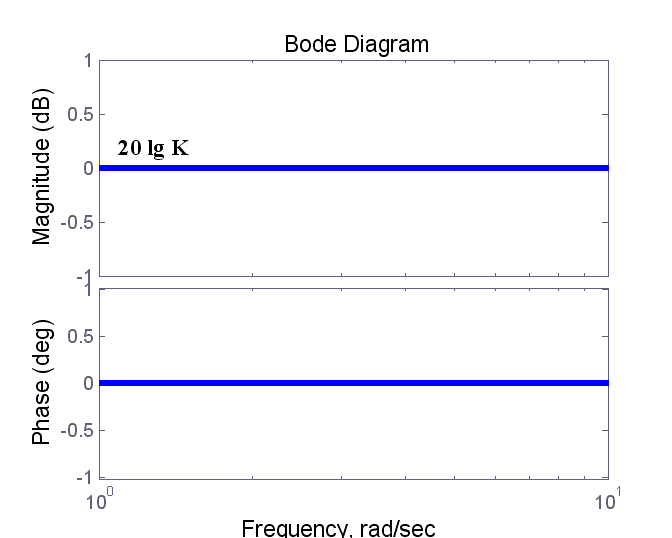
1 |
Усилительное
|
|
|
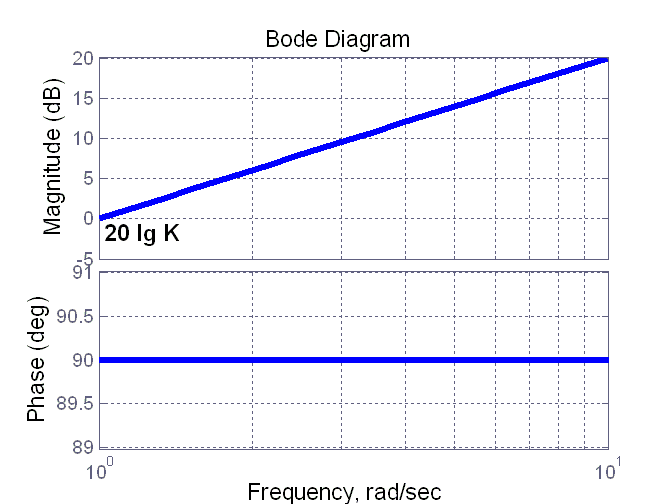
2 |
Интегрирующее
|
|

Продолжение табл. 7
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
3 |
Дифференцирующее (идеальное)
|
|
|
4 |
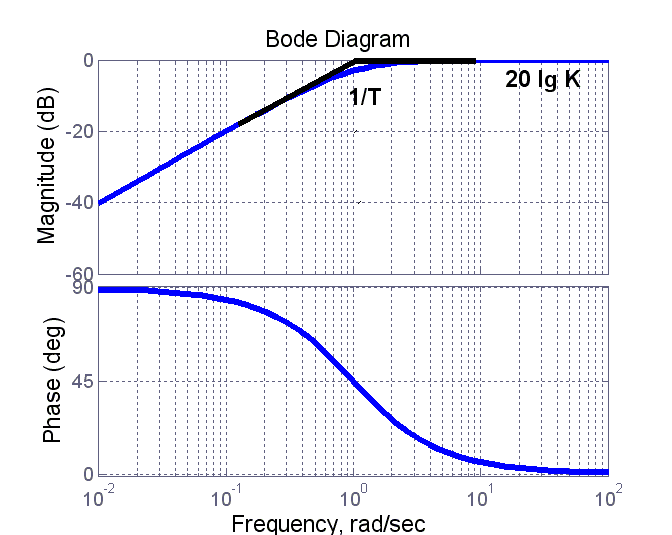
Апериодическое звено 1-го порядка (инерционное)
|
|

Продолжение табл. 7
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
5 |
Форсирующее звено 1-го порядка
|
|
|
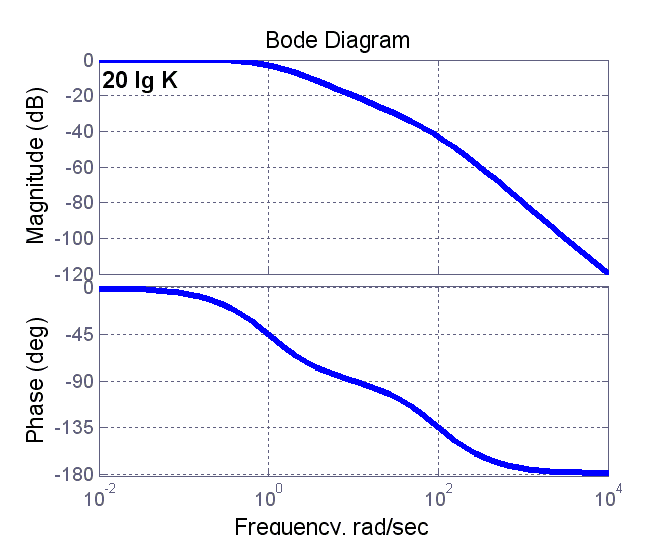
6 |
Апериодическое звено 2-го порядка
|
|

Продолжение табл. 7
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
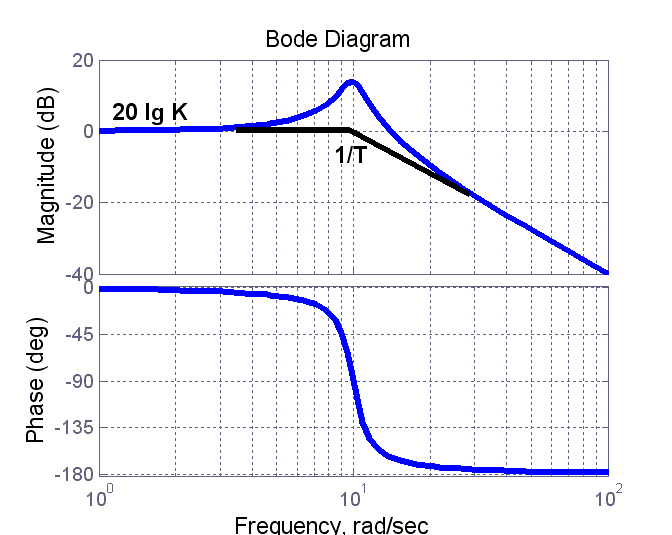
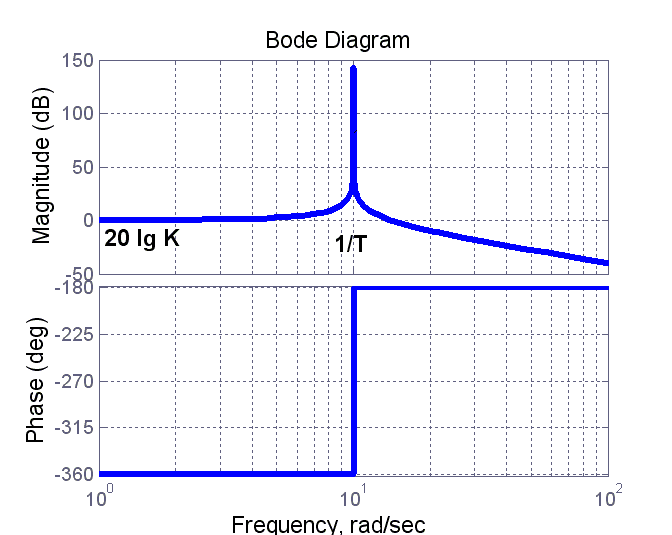
7 |
Колебательное
|
|
|
8 |
Консервативное
|
|
Продолжение табл. 7
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
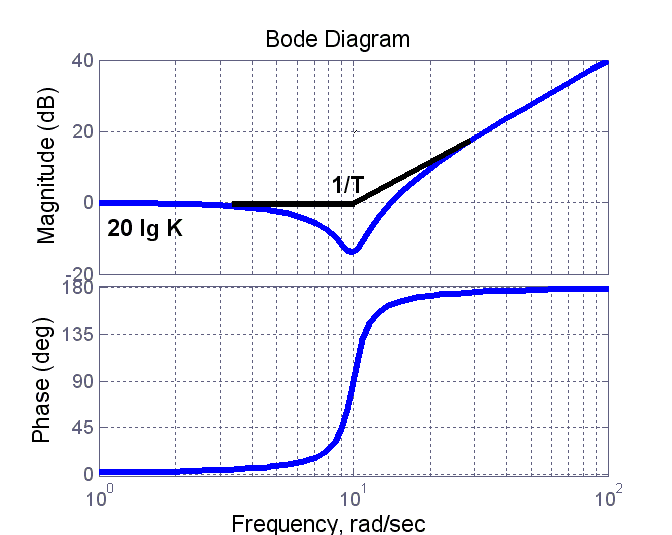
9 |
Форсирующее звено 2-го порядка
|
|
|
10 |
Дифференцирующее реальное (дифференцирующее звено с замедлением)
|
|
Окончание табл. 7
|
№ п/п |
Название звена и его передаточная функция |
Вид ЛАЧХ и ЛФЧХ |
|
11 |
Изодромное (пропорционально-интегральное звено)
|
|
|
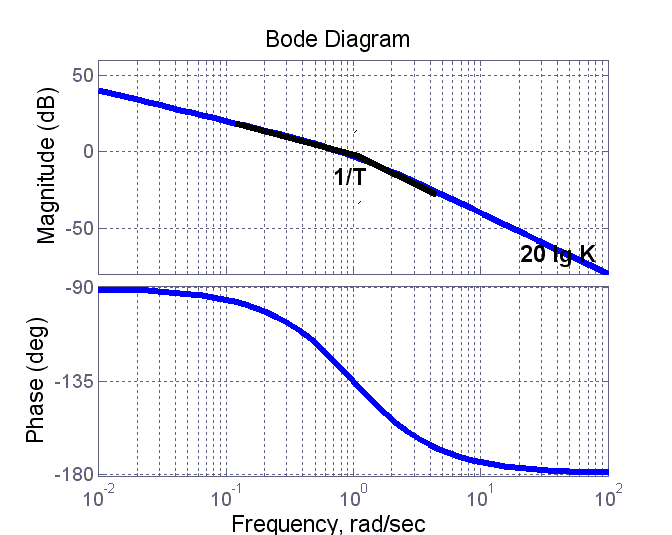
12 |
Интегрирующее звено с замедлением
|
|

3.2. Построение частотных характеристик в среде MatLab
Для построения графиков АФЧХ и логарифмических функций в MatLab используются следующие функции:
nyquist(w) – АФЧХ от передаточной функцииw, заданной с помощью функцииtf;
bode(w) – ЛАЧХ и ЛФЧХ от передаточной функции w, заданной с помощью функцииtf.
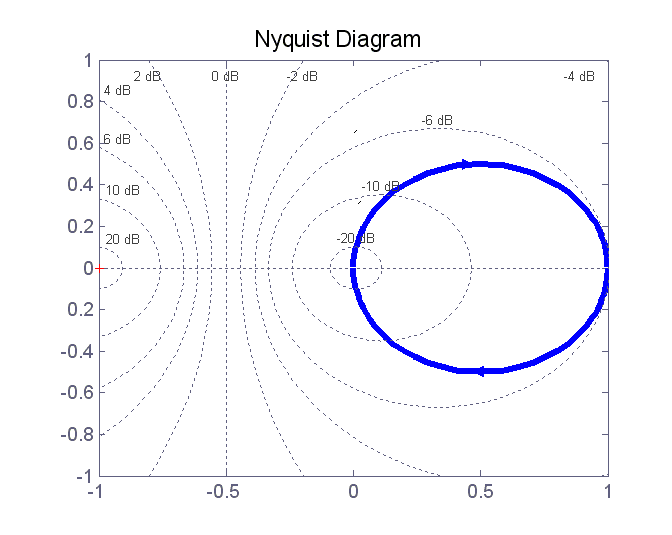
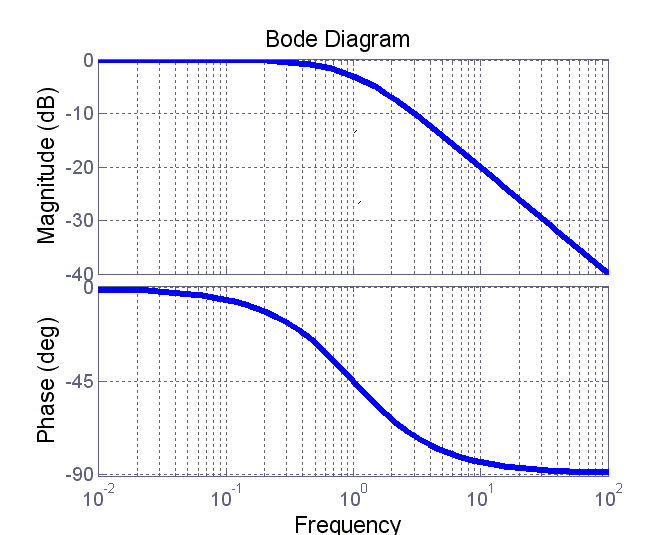
Пример команды для построения частотных характеристик апериодического звена первого порядка (k=1,T=1):
w = tf(1, [1 1])
nyquist(w); grid
figure; bode(w); grid
Результатом выполнения команд приведен на рис. 19. Графики будут построены в двух независимых окнах, на каждом графике нанесена сетка. По умолчанию АФЧХ строится как для положительных, так и для отрицательных значений циклической частоты. Чтобы построить АФЧХ только для положительных значений частоты, нужно сделать щелчок правой кнопкой мыши по графику АФЧХ и выбрать пункт командного меню Show – Negative frequencies (снять галочку).
а) б)
Рис. 19. Частотные характеристик в среде MatLab
Второй способ построения частотных характеристик предполагает использование приложения LTIview, входящее в состав пакетаMatLab. Синтаксис команды построения следующий:
w = tf(1, [1 1])
ltiview(w)
В появившемся окне следует выбрать пункт меню Edit – Plot Configuration – Bode (Nyquist).
Для копирования графика в отчет (например, выполненный в редакторе MicrosoftWord) необходимо, находясь в окне рисунка, выбрать следующие пункты меню:Edit–CopyFigure. Затем в редактореMicrosoftWordнеобходимо поставить курсор в нужное место и выбрать пункт Правка – Вставить (Ctrl+V). Если графики построены с помощьюLTIViewer, необходимо сначала выполнить командуFile–PrinttoFigure.