

Варианты заданий для практической работы
Таблица 8
Передаточные функции и варианты соединения
|
№ варианта |
№ схемы (таблица 4.2) |
Параметры передаточных функций | |||
|
W1(s) |
W2(s) |
W3(s) |
W4(s) | ||
|
1 |
1 |
|
|
|
k4 |
|
2 |
2 |
|
|
| |
|
3 |
3 |
|
|
| |
|
4 |
4 |
|
|
| |
|
5 |
5 |
|
|
| |
|
6 |
6 |
|
|
| |
|
7 |
7 |
|
|
| |
|
8 |
1 |
|
|
| |
|
9 |
2 |
|
|
| |
|
10 |
3 |
|
|
| |
|
11 |
4 |
|
|
| |
|
12 |
5 |
|
|
| |
|
13 |
6 |
|
|
| |
|
14 |
7 |
|
|
| |
Таблица 9
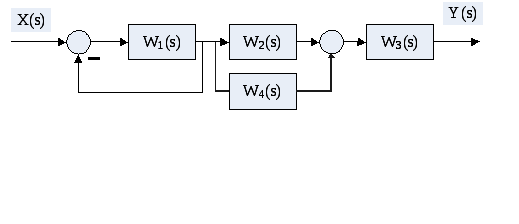
Структурные схемы САУ
|
Схема № |
Схема | |
|
1 |
| |
|
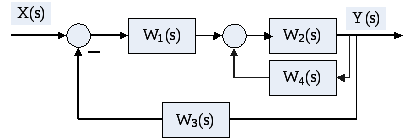
2 |
| |
|
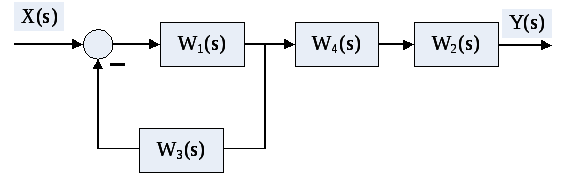
3 |
| |
|
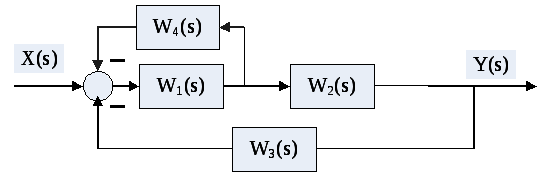
4 |
| |
|
5 |
| |

Окончание табл. 9
|
Схема № |
Схема |
|
6 |
|
|
7 |
|
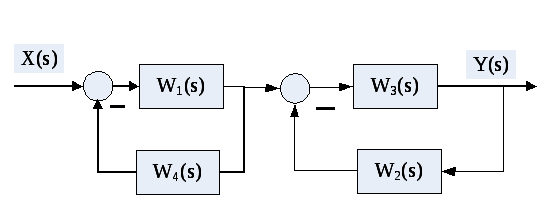
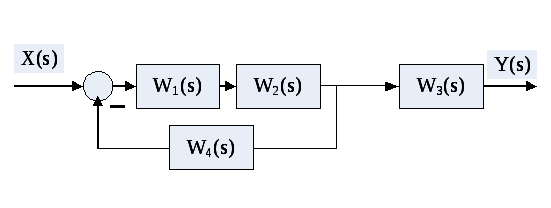
Таблица 10
Значения параметров для передаточных функций
|
№ варианта |
k1 |
T1 |
k2 |
T2 |
k3 |
T3 |
k4 |
|
1 |
0,25 |
|
10 |
|
0,25 |
|
0,1 |
|
2 |
0,05 |
|
1 |
0,5 |
20 |
0,01 | |
|
3 |
10 |
0,01 |
0,25 |
|
2 |
0,001 | |
|
4 |
10 |
0,005 |
0,02 |
|
5 |
0,01 | |
|
5 |
10 |
1 |
0,02 |
0,01 |
10 |
| |
|
6 |
|
|
0,02 |
0,05 |
10 |
0,1 | |
|
7 |
5 |
|
10 |
|
0,05 |
0,01 | |
|
8 |
1 |
|
0,1 |
0,1 |
10 |
0,01 | |
|
9 |
5 |
|
0,01 |
1 |
10 |
0,01 | |
|
10 |
5 |
0,001 |
10 |
|
0,5 |
0,01 | |
|
11 |
0,5 |
0,01 |
10 |
|
10 |
|
0,25 |
|
12 |
0,02 |
0,1 |
10 |
0,001 |
10 |
0,01 | |
|
13 |
|
|
10 |
0,05 |
0,5 |
0,001 | |
|
14 |
10 |
|
10 |
|
0,5 |
0,001 |
Контрольные вопросы
Перечислите типичные схемы соединения звеньев САУ.
Как получить эквивалентную передаточную функцию для каскадного соединения?
Как получить эквивалентную передаточную функцию для параллельного соединения?
Как получить эквивалентную передаточную функцию для встречно-параллельного соединения?
Что называется прямой цепью САУ?
Что называется разомкнутой САУ?
Как перенести сумматор через звено по ходу и против движения сигнала?
Как перенести узел через звено по ходу и против движения сигнала?
Как перенести узел через узел по ходу и против движения сигнала?
Как перенести сумматор через сумматор по ходу и против движения сигнала?
Как перенести узел через сумматор и сумматор через узел по ходу и против движения сигнала?
5. Исследование основных структур сау
5.1. Разомкнутые системы автоматического управления
При изображении систем управления применяют два принципа – функциональный и структурный, и соответственно схемы подразделяются на функциональные и структурные схемы. Математические модели также можно представить в виде структурных схем, поэтому описание модели и САУ однотипны, что существенно облегчает понимание процессов функционирования САУ. Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.
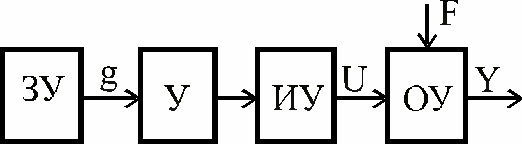
Рис. 31. Функциональная схема разомкнутой САУ
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления. На рис. 31 приняты следующие обозначения:
ЗУ – задающее устройство;
У – усилитель;
ИУ – исполнительное устройство;
g– задающее воздействие;
U– управляющее воздействие;
Y– выходная величина;
F– возмущающее воздействие.
Задающее устройство вырабатывает задающее воздействие g, в соответствии с которым устанавливается управляющее воздействиеU. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления, кроме управляющего, всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействииgизменение возмущающего воздействияFвызывает изменение выходной величиныY. Большинство устройств систем управления являются инерционными.
Установившийся режим работы наступает лишь по истечении некоторого времени. В установившемся режиме работы свойства системы можно охарактеризовать с помощью нагрузочной характеристики.
Нагрузочная характеристика представляет
собой зависимость выходной величины
системы от возмущающего воздействия
![]() .
.
В разомкнутой системе нагрузочная
характеристика – это характеристика
объекта. Она не зависит от других
элементов (усилителя, исполнительного
устройства). Любые изменения возмущающего
воздействия вызывают изменения выходной
величины. Разомкнутую систему можно
оценить по величине отклонения выходного
сигнала
![]() под влиянием возмущающего воздействия
под влиянием возмущающего воздействия![]() .
.

Рис. 32. Изменение выходных величин объекта при изменении возмущающего воздействия. Нагрузочная характеристика САУ